

Method and device for calibrating sensor for measuring angle of mechanical arm or manipulator
A calibration method and calibration device technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of increased production and use costs, inaccurate calibration results, sensor damage, etc., to reduce production and use costs, ensure calibration accuracy, and eliminate errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
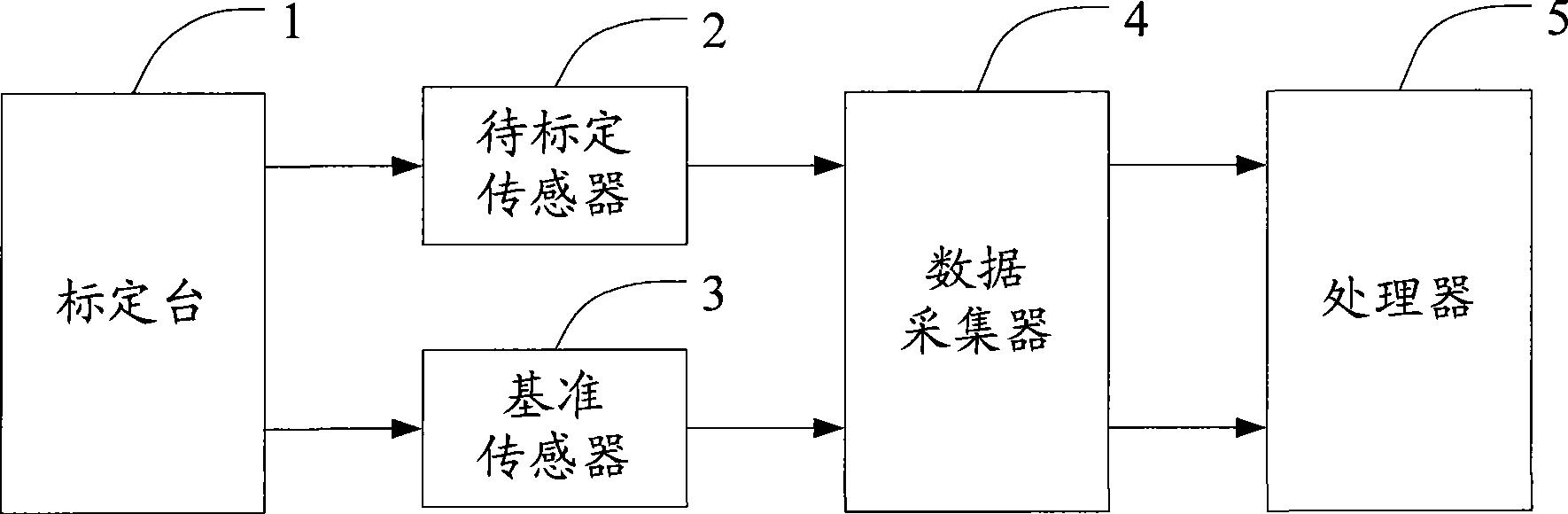
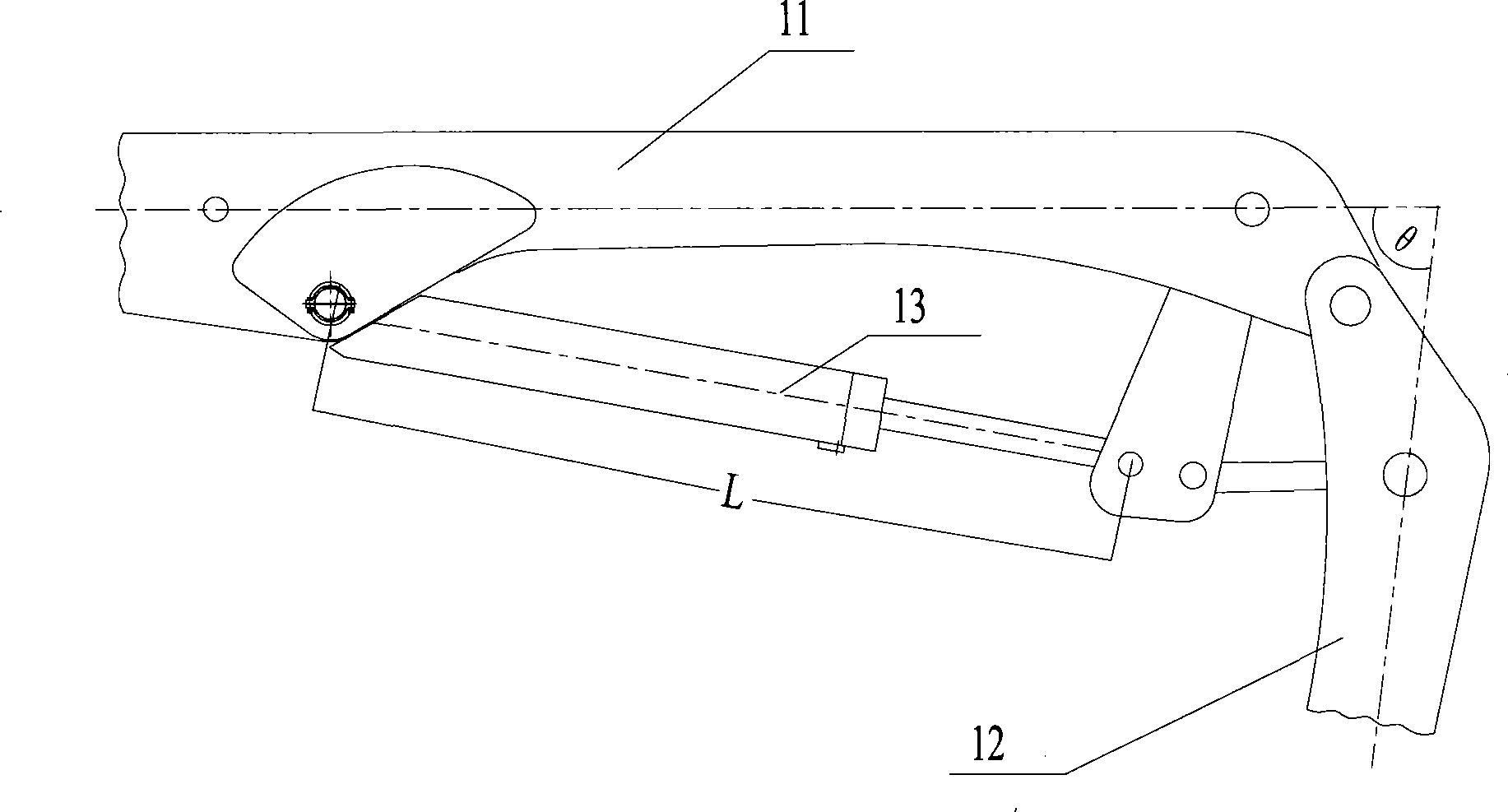
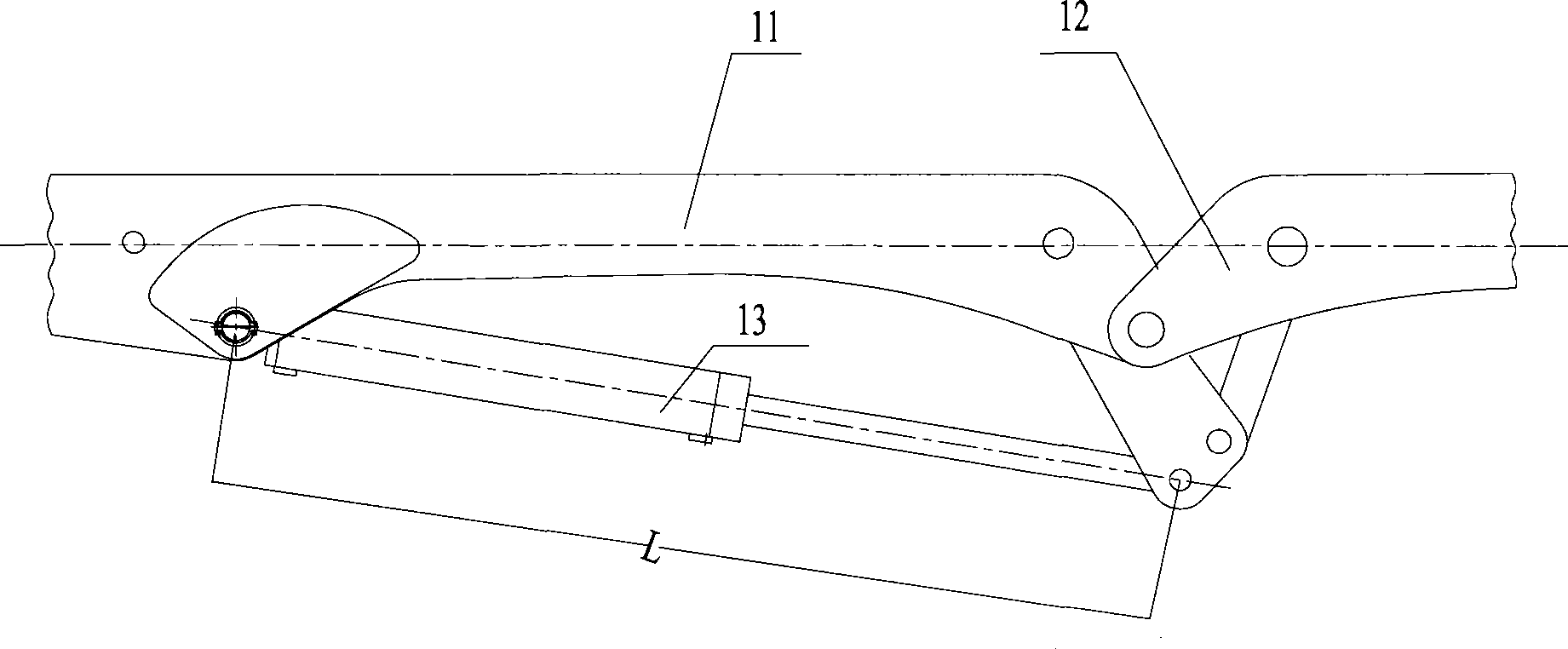
[0032] The basic idea of the present invention is to save the data list between the length of the mechanical arm or the driving mechanism of the mechanical arm and the angle of the mechanical arm or the mechanical arm; by obtaining the length of the mechanical arm or the driving mechanism of the mechanical arm, the corresponding theoretical value of the mechanical arm or the angle of the mechanical arm is obtained, so as to This is used as the calibration reference value of the sensor; compare and analyze the measured value of the sensor with the calibration reference value to complete the calibration of the sensor.
[0033] It can be seen that the key to solving the problem in the present invention is to calibrate the sensor under the premise of installing the sensor on the robot arm or manipulator arbitrarily, so that the real-time measured value returned by the sensor corresponds to the logic value defined in the control process one by one.
[0034] The principle of the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More