

Barrier-free constant speed creeping robot
A crawling robot, barrier-free technology, applied in the field of robotics, can solve the problem that the robot is difficult to adapt, and achieve the effect of uniform motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing:
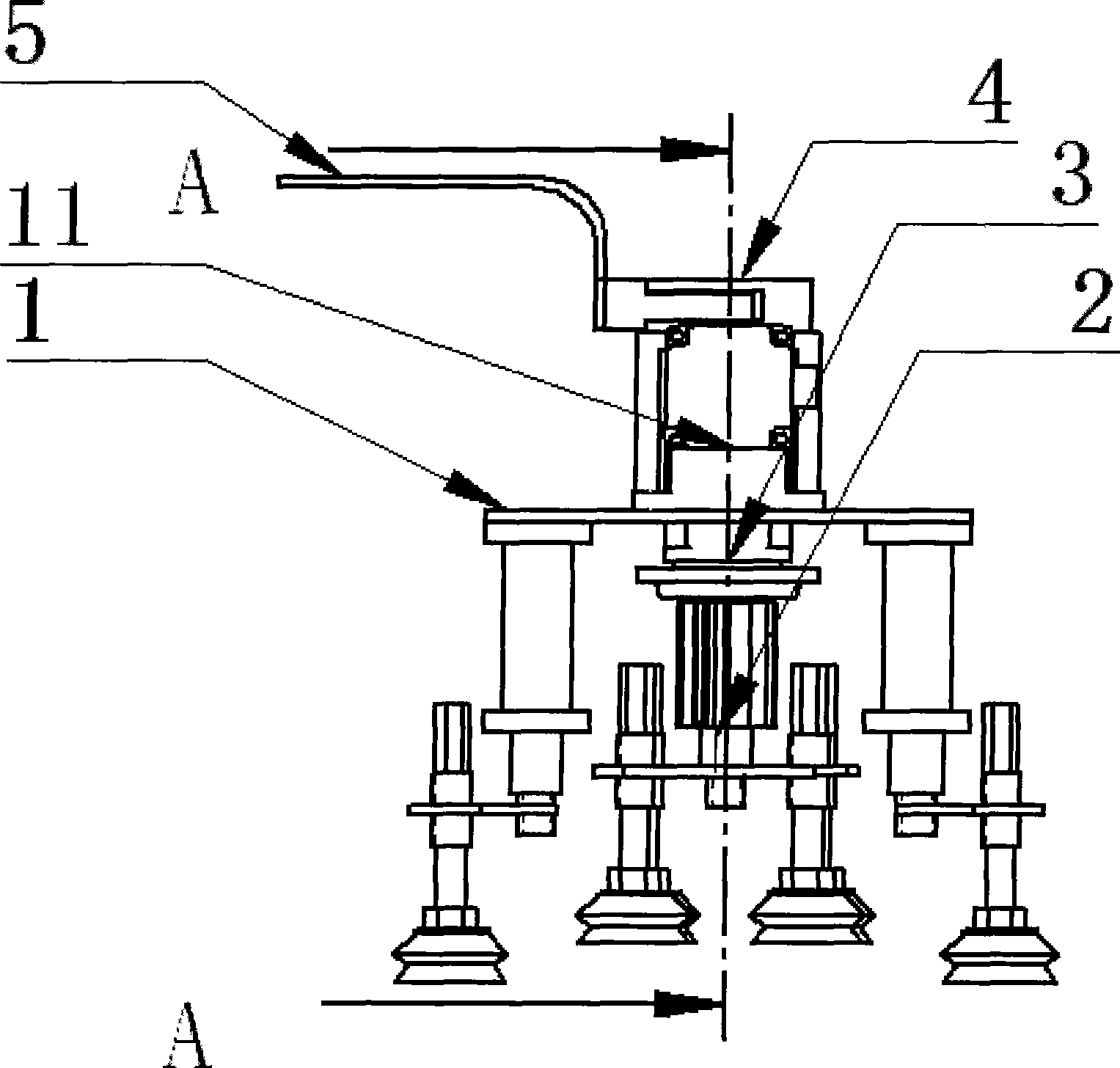
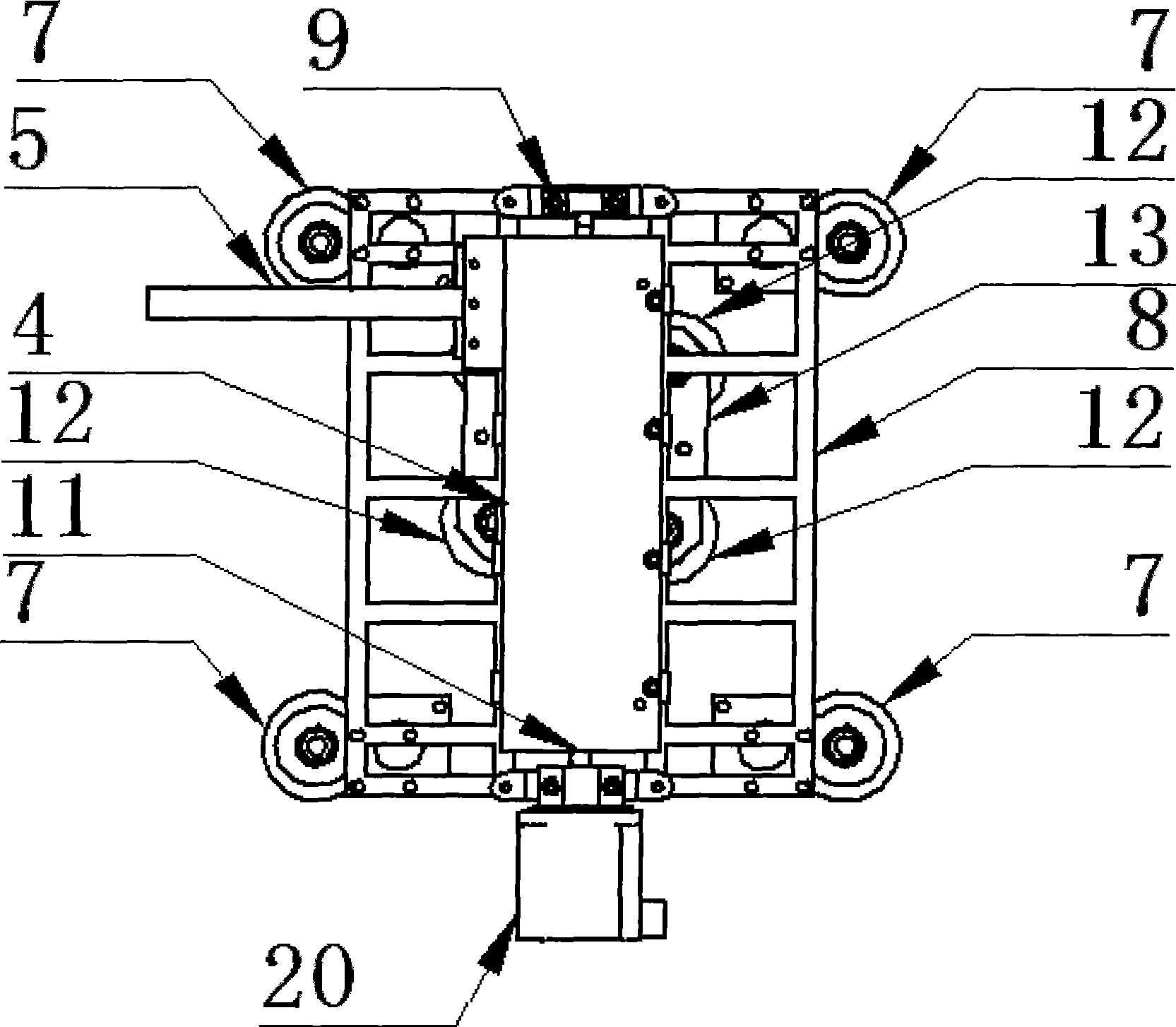
[0027] The structure of the crawling robot with a vacuum adsorption frame type and a load moving at a constant speed in this embodiment is as follows: figure 2 As shown, it consists of five parts: an outer frame 1, an inner frame 2, a linear motion mechanism 11, a rotary mechanism 3 and a linear motor 4. In the present invention, the main body of the robot adopts a frame-type multi-sucker vacuum adsorption structure, a rotating mechanism is installed between the inner and outer frames, the outer frame carries a linear motor, the actuator is fixed on the linear motor mover, and the legs adopt a pop-up mechanism. The four corners of the outer frame are respectively equipped with ejection mechanism of the outer suction cup, the end of the ejection mechanism is connected with the outer suction cup through the outer suction cup fixing plate, the linear motor is installed above ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More