

Multi-rotor wheel-leg type multifunctional air robot and sports programming method thereof
An aerial robot and robot technology, applied in the field of machinery, can solve the problems of limited application range and single task of aerial robot, and achieve the effects of wide application range, strong obstacle surmounting ability, and simple mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be further described in detail below in conjunction with the accompanying drawings.
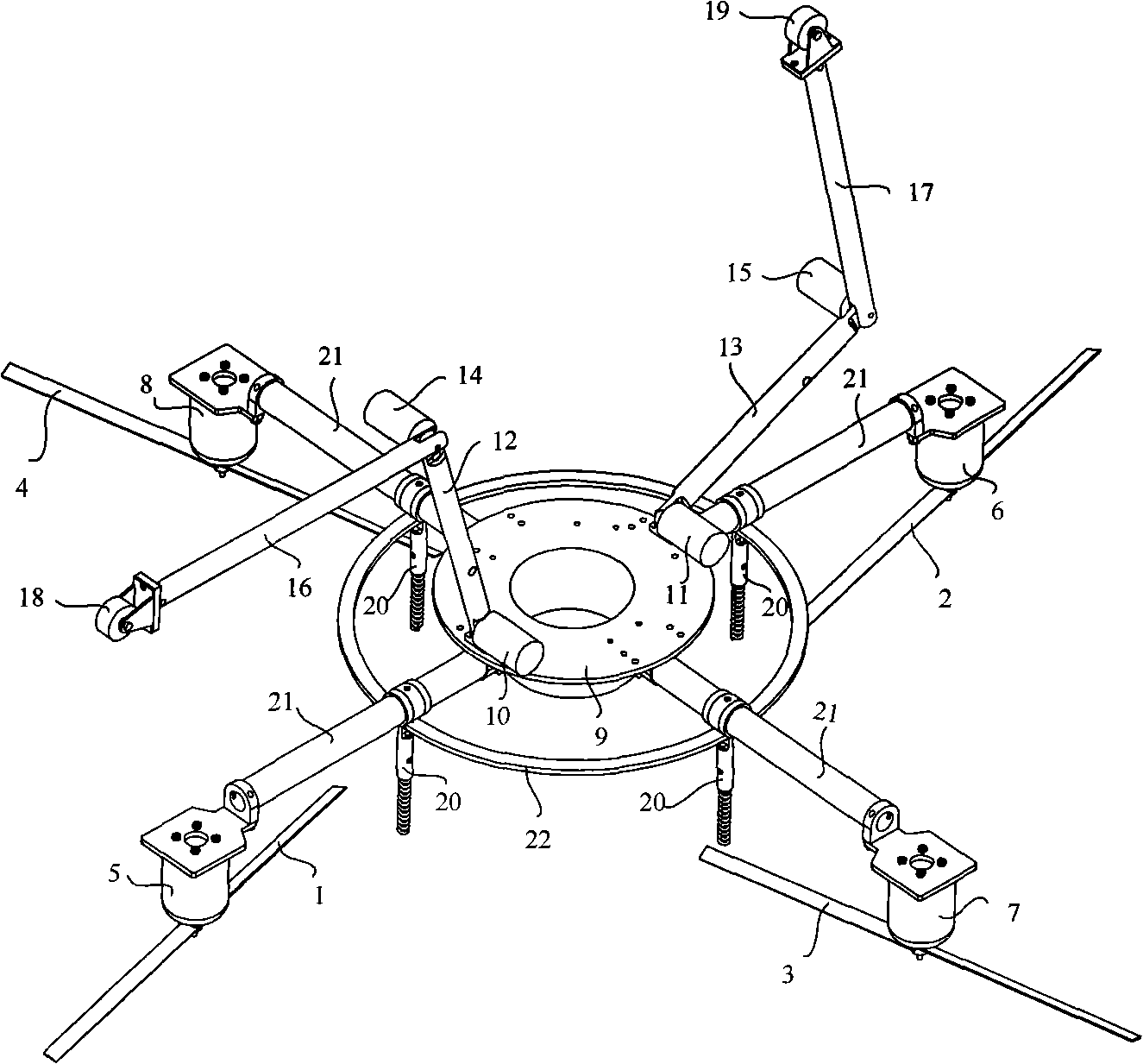
[0079] The present invention is a kind of multi-rotor leg-wheel type multifunctional aerial robot, such as figure 1 As shown, including rotor A1, rotor B2, rotor C3, rotor D4, rotor drive motor A5, rotor drive motor B6, rotor drive motor C7, rotor drive motor D8, wall climbing thigh A12, wall climbing thigh B13, wall climbing calf A16 , climbing calf B17, hip joint driving motor A10, hip joint driving motor B11, knee joint driving motor A14, knee joint driving motor B15, robot main body 9, wall walking wheel A18, wall walking wheel B19, floor support rod 20, rotor Support rod 21, rigidity reinforcing ring 22.
[0080] The robot main body 9 is a circular disk-shaped structure, and four rotor support rods 21 are distributed symmetrically around the lower surface of the robot main body 9, and are fixed on the robot main body 9 with screws. Rotor drive motor A5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More