

Inertia measurement device for deep-sea inertia navigation
An inertial measurement device and inertial navigation technology, which is applied in directions such as navigation through speed/acceleration measurement, can solve problems such as impact of the measurement device, impact on measurement accuracy, and large errors, and achieve improved accuracy, high precision, and good anti-vibration performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
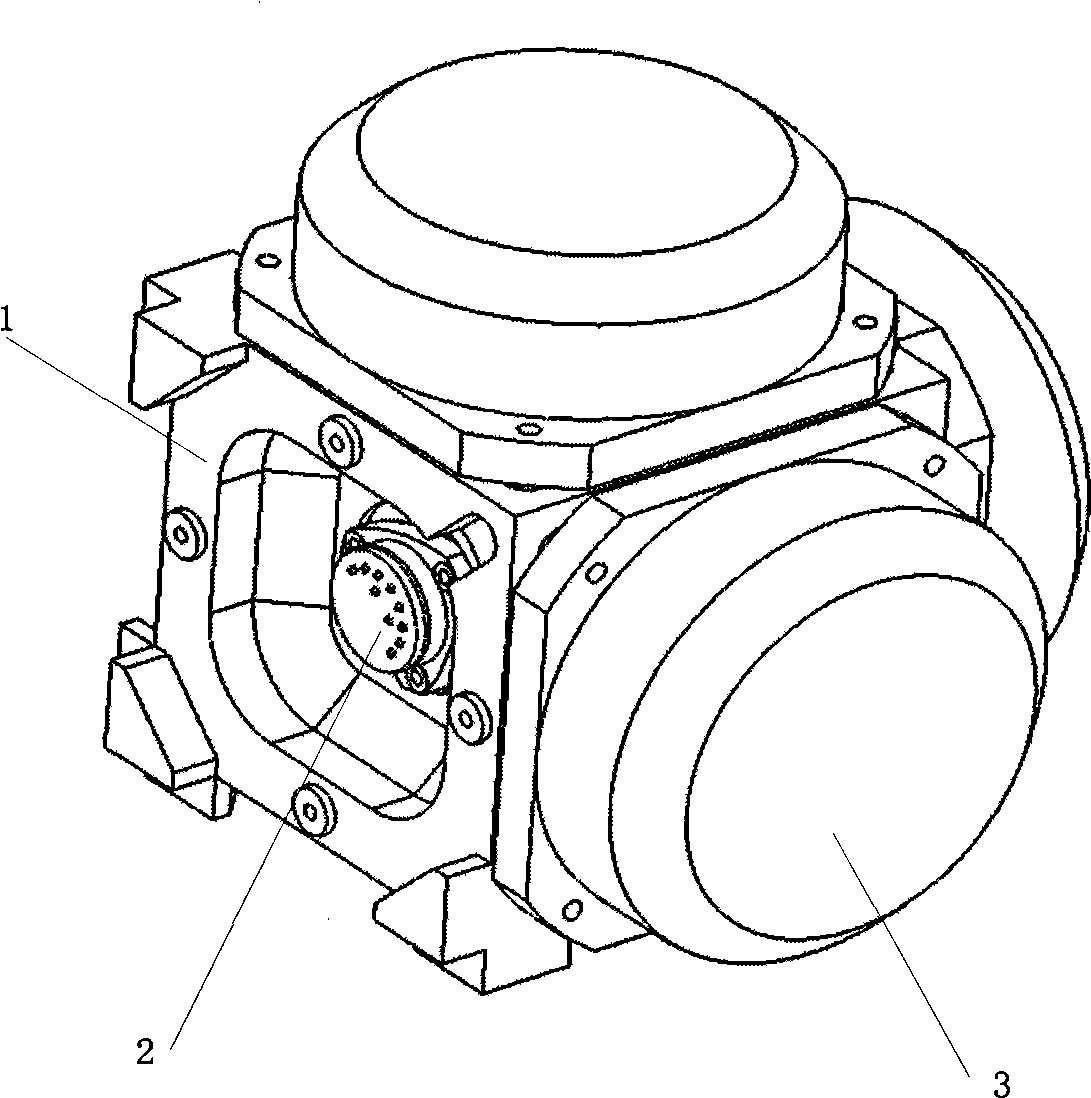
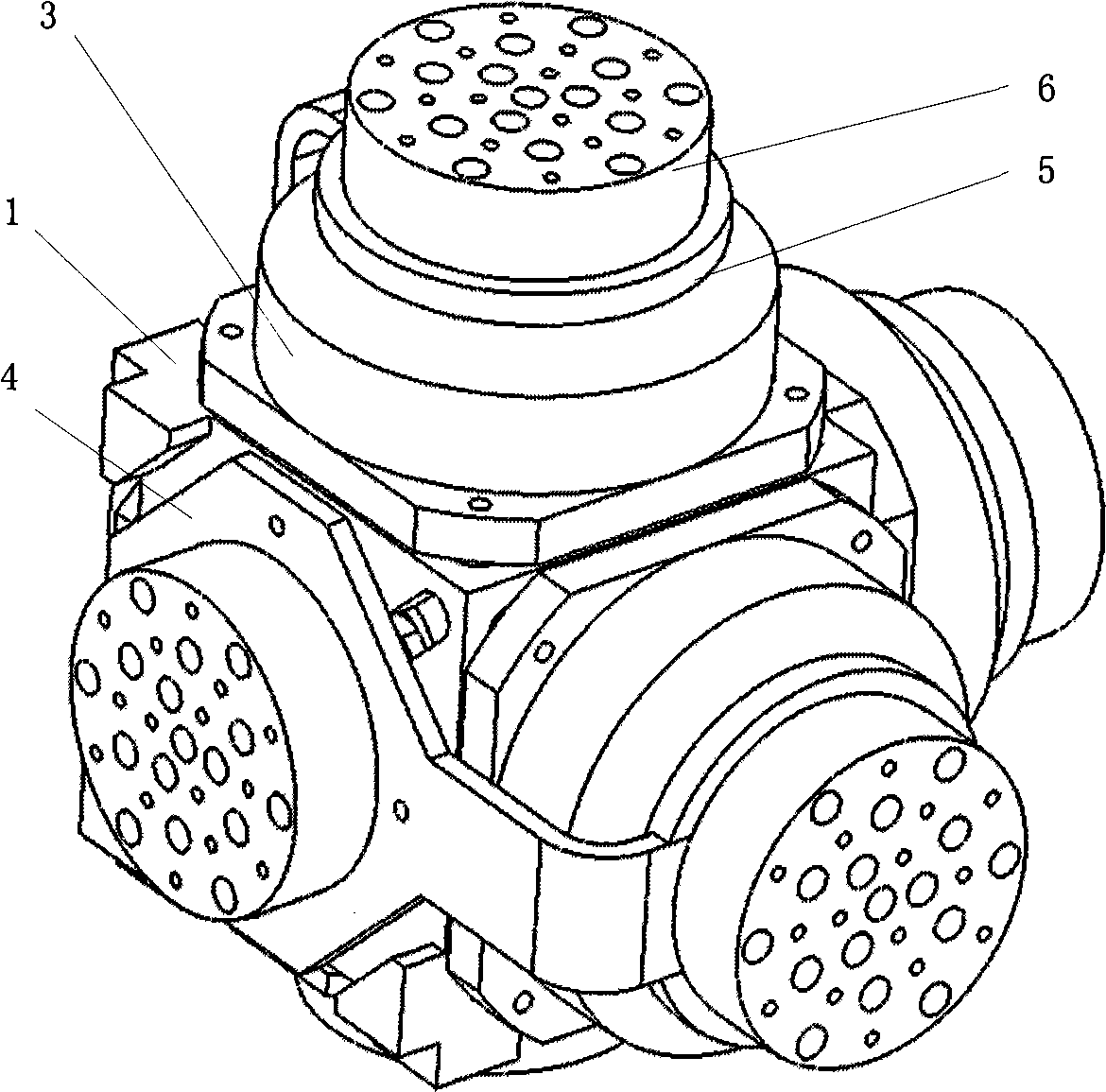
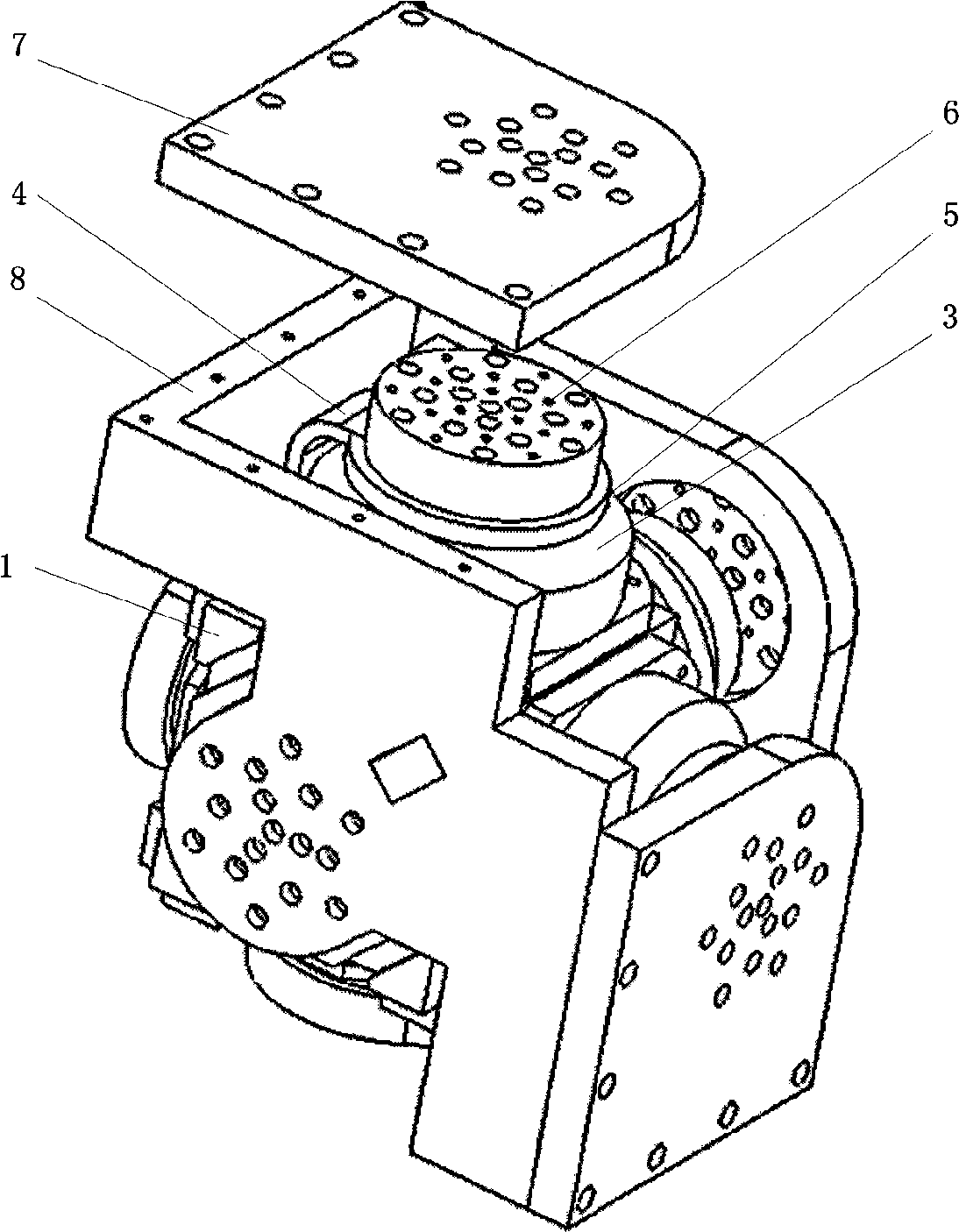
[0021] The structure of the inertial measurement device of the present invention includes: 6 accelerometers, 3 gyroscopes, sensor brackets, vibration-damping materials, vibration-damping inner and outer brackets and installation surfaces.
[0022] The assembly process of the IMU structure is as follows: Figure 1~4 shown. Such as figure 1 As shown, six accelerometers 2 are respectively installed in the six cavities of the sensor bracket 1 . The two accelerometers of the large range and the small range are installed coaxially and concentrically, and the three groups of accelerometers are perpendicular to each other. Three gyroscopes 3 are vertically installed on three faces of the hexahedron. The sensor bracket 1 is a regular hexahedron, the details are as follows Figure 5 shown. In the figure, 6 cylindrical holes 1d are coaxial in pairs, and 3 groups of cylindrical holes are perpendicular to each other. The cylindrical hole is used to install the accelerometer 2. There ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More