

Improved particle swarm algorithm for automatic optimization of control law parameters of unmanned aircraft
A technology for improving particle swarm and particle swarm algorithm, which is applied in the field of unmanned aircraft flight control, and can solve the problems of complicated, drastic changes in aerodynamic parameters, and time-consuming.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] specific implementation plan
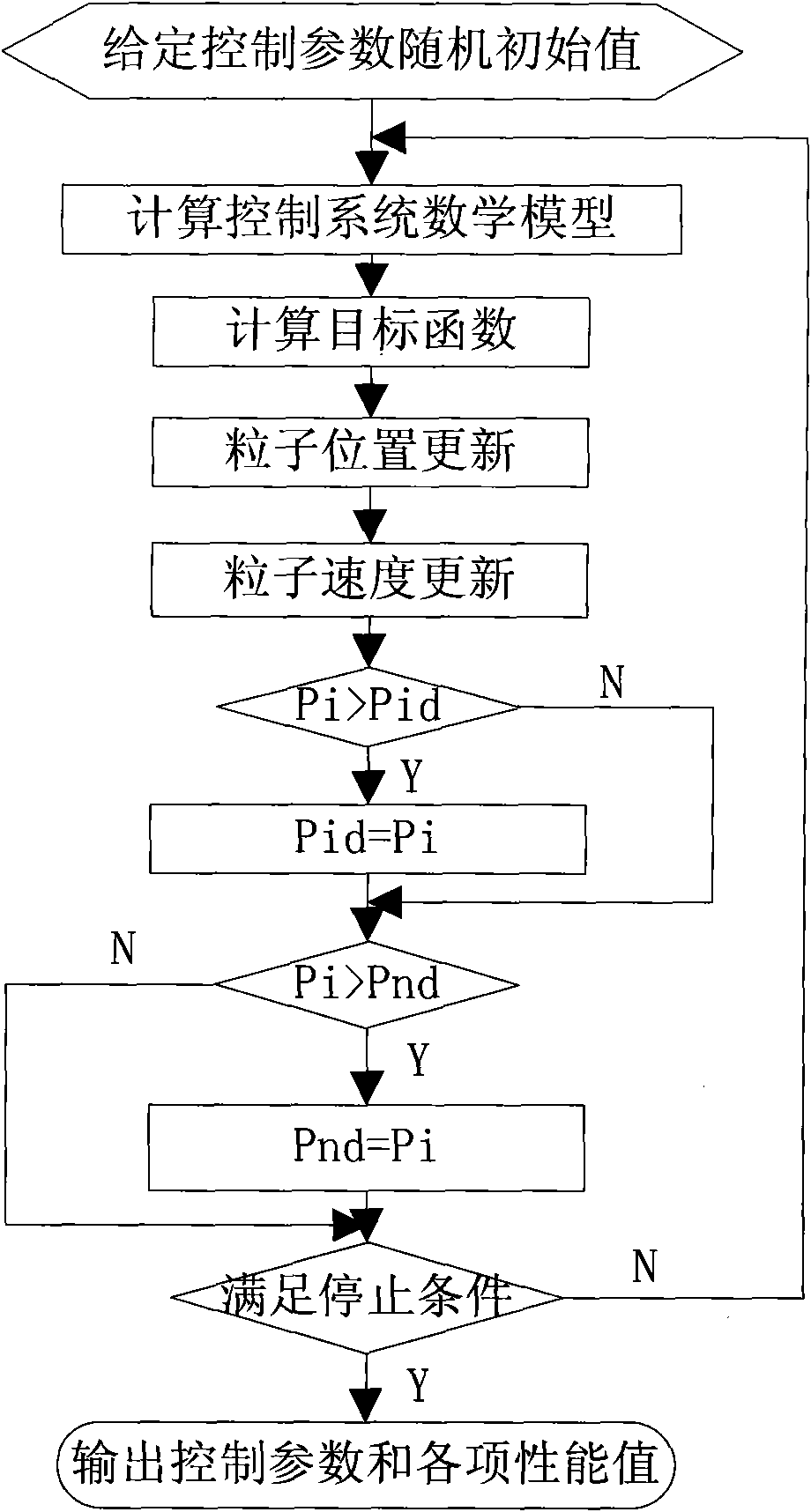
[0019] The PSO algorithm is an optimization algorithm based on iteration. The system is initialized to a set of random solutions, and the optimal value is found through iteration. The mathematical description of the algorithm is as follows:
[0020] Suppose there are m particles in n-dimensional search space, particle x i (i=1, 2, ..., m) has a spatial position of p i =(x i1 , x i2 ,...,x in ), put x i Bringing it into the objective function can calculate its fitness, and measure x according to the size of the fitness i pros and cons. The optimal position experienced by a single particle is recorded as p id , the optimal position experienced by the entire particle swarm is recorded as p xd , the particle updates its velocity and position according to the following formula:
[0021] v id (t+1)=w×v id (t)+c 1 ×rand()×(P id (t)-x id (t)+c 2 ×rand()×(p nd (t)-x id (t))
[0022] x id (t+1)=x id(t) +v id (t+1)
[0023] To a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More