

Method for controlling motion of bionic long-fin undulatory propeller
A control method and motion control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that there are few detailed introductions to the motion control method of fluctuating fins
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
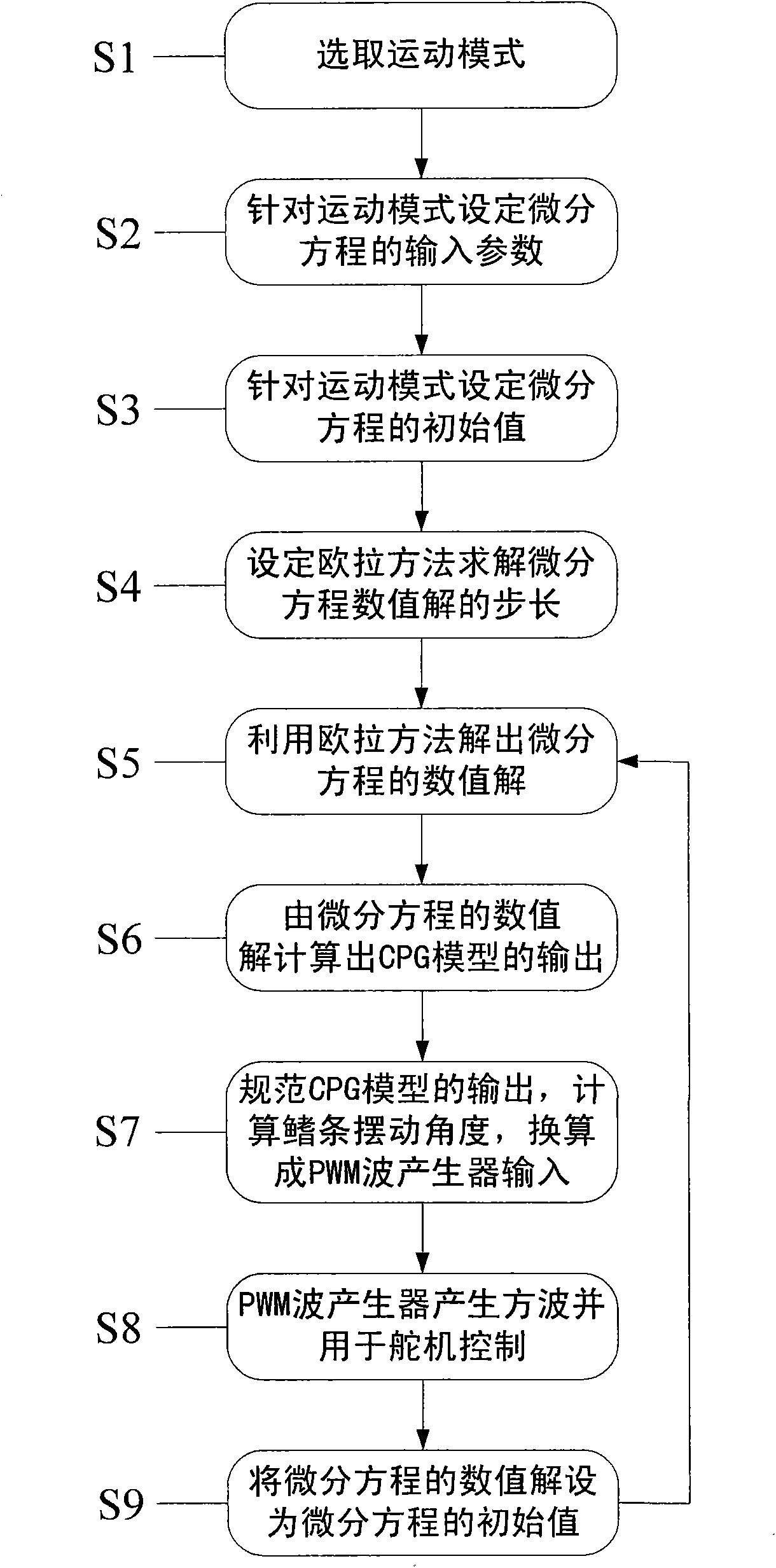
[0034] The motion control method of the simulated long fin wave propeller based on the CPG model of the central mode generator will be described below in conjunction with the accompanying drawings.
[0035] according to figure 1 The control method of the long-fin undulating thruster of the present invention is introduced in detail, and the input parameters and initial values of the differential equation of the central pattern generator CPG model are set according to the different motion modes selected, and the control amount of the thruster steering gear is obtained through calculation to realize motion control. The input parameters and initial values are used to coordinate and control the swing of a plurality of fin rays, and realize the emergency stop motion control of the long-fin undulation thruster, the turning motion control of the imitation long-fin undulation thruster and the realization of the long-fin undulation thruster Quick start motion control. The operatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More