

Method for reproducing texture force touch based on shape-from-shading technology
An image grayscale and shape recovery technology, applied in image data processing, 3D image processing, graphic reading, etc., can solve problems such as poor trend and depth expression, unrealistic three-dimensional surface contours, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
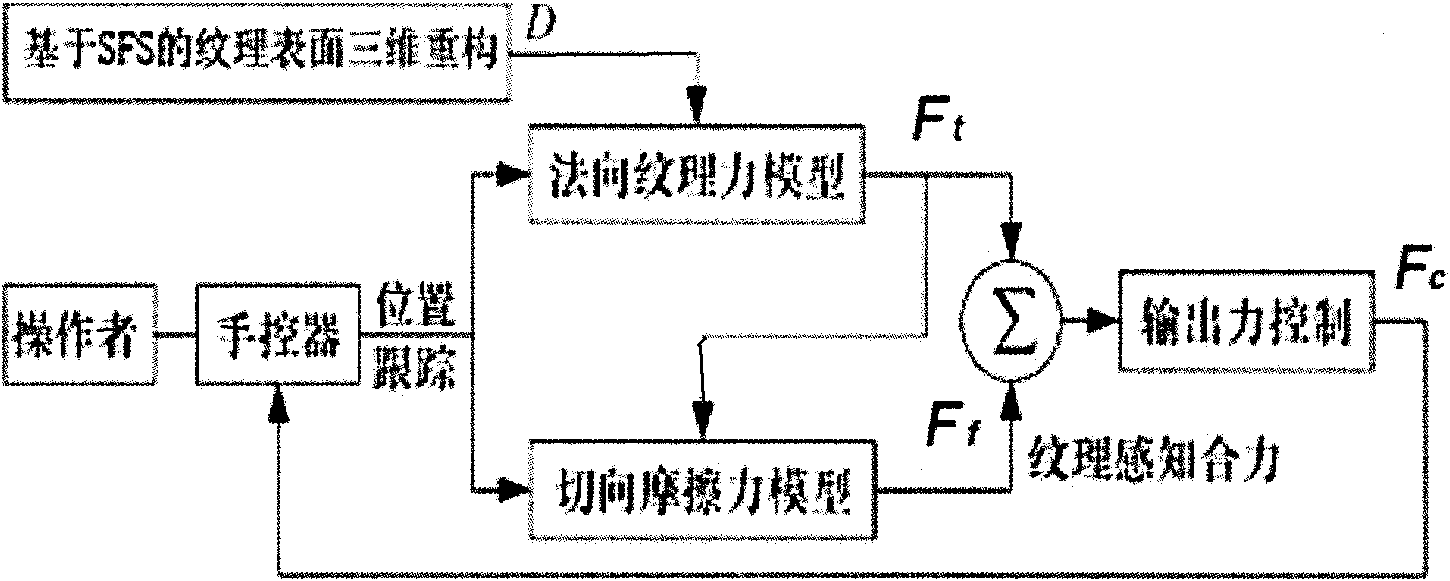
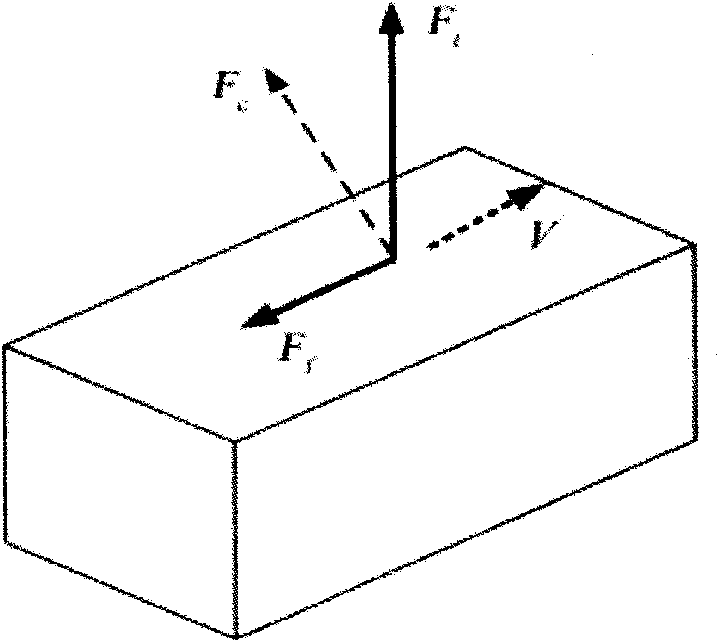
[0062] see figure 1 , in order to reproduce the tactile feeling of the image texture more realistically, the real texture image is firstly processed with normalized grayscale, and the three-dimensional information of the texture is extracted from the grayscale information of the image to reconstruct the virtual surface; the operator controls the virtual surface through the hand controller. The probe "gropes" on the virtual surface; then the force-tactile model is used to calculate the microscopic normal force and friction force of the contact point between the virtual probe and the virtual surface, and the resultant force of texture perception is fed back to the operator in real time by the hand controller.
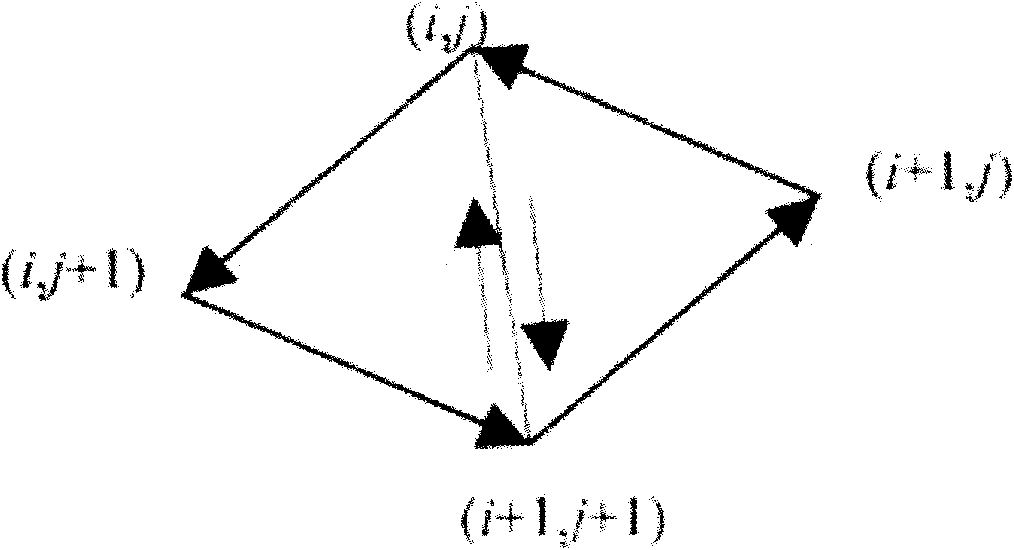
[0063] see figure 2 , use the right-hand rule to construct a triangle with three points (i, j), (i+1, j+1), (i+1, j); then according to the right-hand rule, use (i, j) , (i, j+1), (i+1, j+1) construct another triangle, so that each discrete point can construct two trian...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More