

Method of Camera Calibration Using Two Same Circles
A camera calibration and camera technology, applied in the field of autonomous navigation system and camera calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
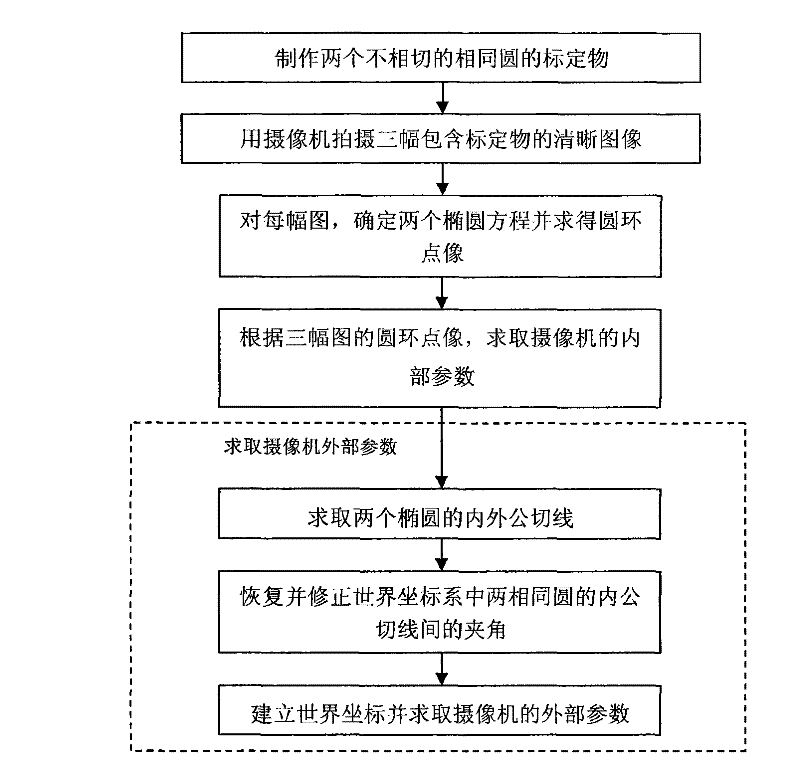
[0047] In order to better understand the present invention, the specific embodiment of the present invention will be further described below in conjunction with the accompanying drawings, and the flow chart of the specific steps is as follows figure 1 As shown, the specific steps of applying this method for camera calibration are as follows:
[0048] Step 1: First formulate the calibrator. Draw two identical circles arbitrarily on a flat object or place two identical circular objects arbitrarily, and note that two identical circles cannot be tangent. Take these two non-tangent identical circles as calibration objects.
[0049] Step 2: Place the calibration object flatly within the field of view of the camera, use the camera to shoot the calibration object from three different angles, and obtain three images of the calibration object with two elliptical images respectively to ensure clear imaging.
[0050] Step 3: Perform the following operations on each calibration object im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More