

Motion method of robot
A robot motion, robot technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
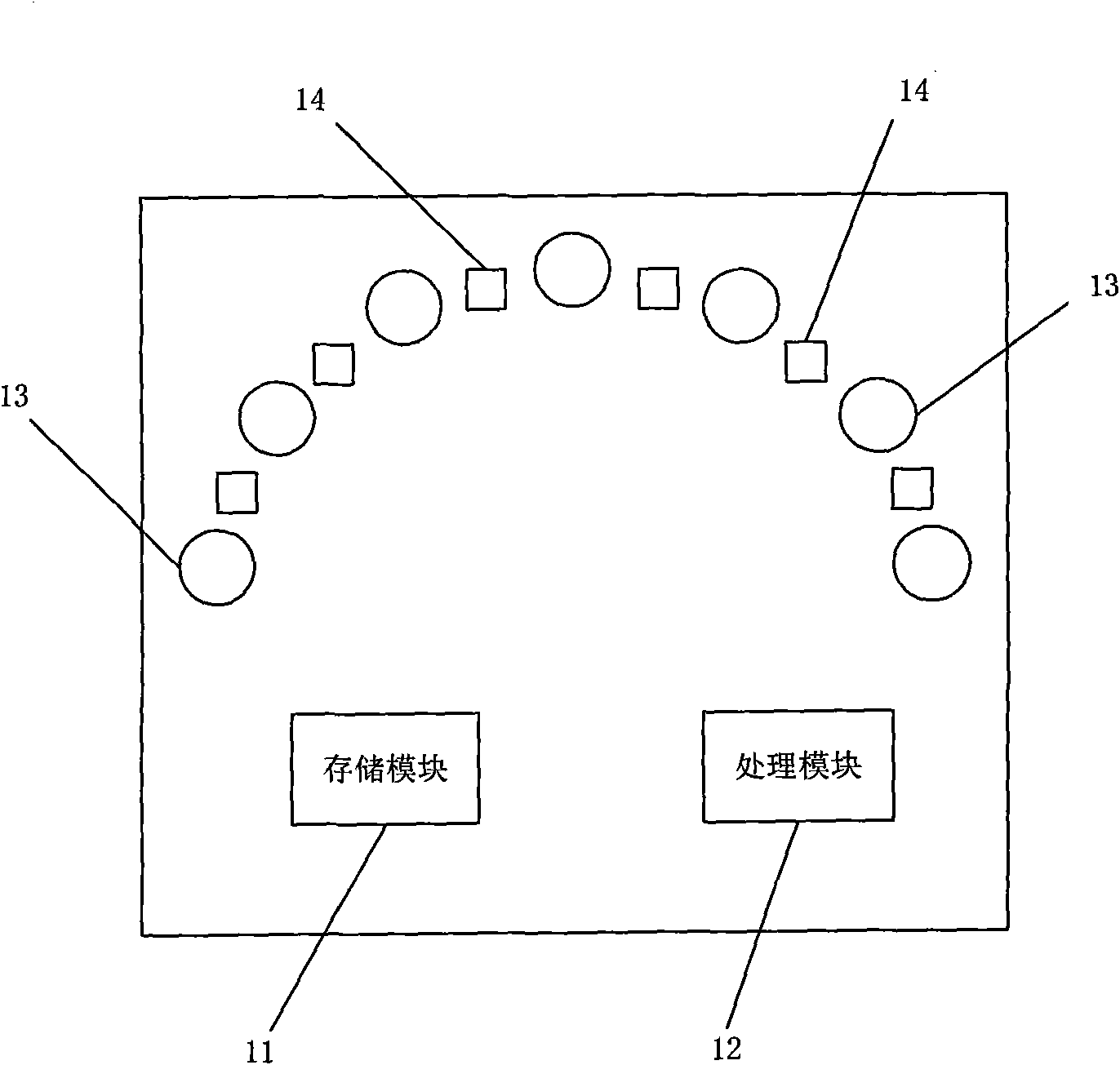
[0030] figure 1 It is a structural schematic diagram of a robot in a specific embodiment of the present invention. Such as figure 1 As shown, the robot is equipped with a storage module 11 and a processing module 12. The storage module is used to store the map information of the robot's movement area, and the processing module is used to calculate the position information of the end point of the movement and the current position information of the robot, and process the robot received from the outside. information and control the movement of the robot.
[0031] Two kinds of detectors are also installed on the robot: ultrasonic detector 13 and infrared detector 14.
[0032] The effective detection range of the ultrasonic detector is 5 centimeters to 5 meters, and the distance that can return to av...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More