

Platform with six degrees of freedom of motion
A degree of freedom and platform technology, which is applied in the field of control platform free lifting, flipping device, and translation, can solve the problems that the platform cannot be tilted and rolled over, unfavorable equipment, equipment loading, and high height of the bottom of the platform, so as to reduce the volume and reduce the failure rate, and the effect of improving load bearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
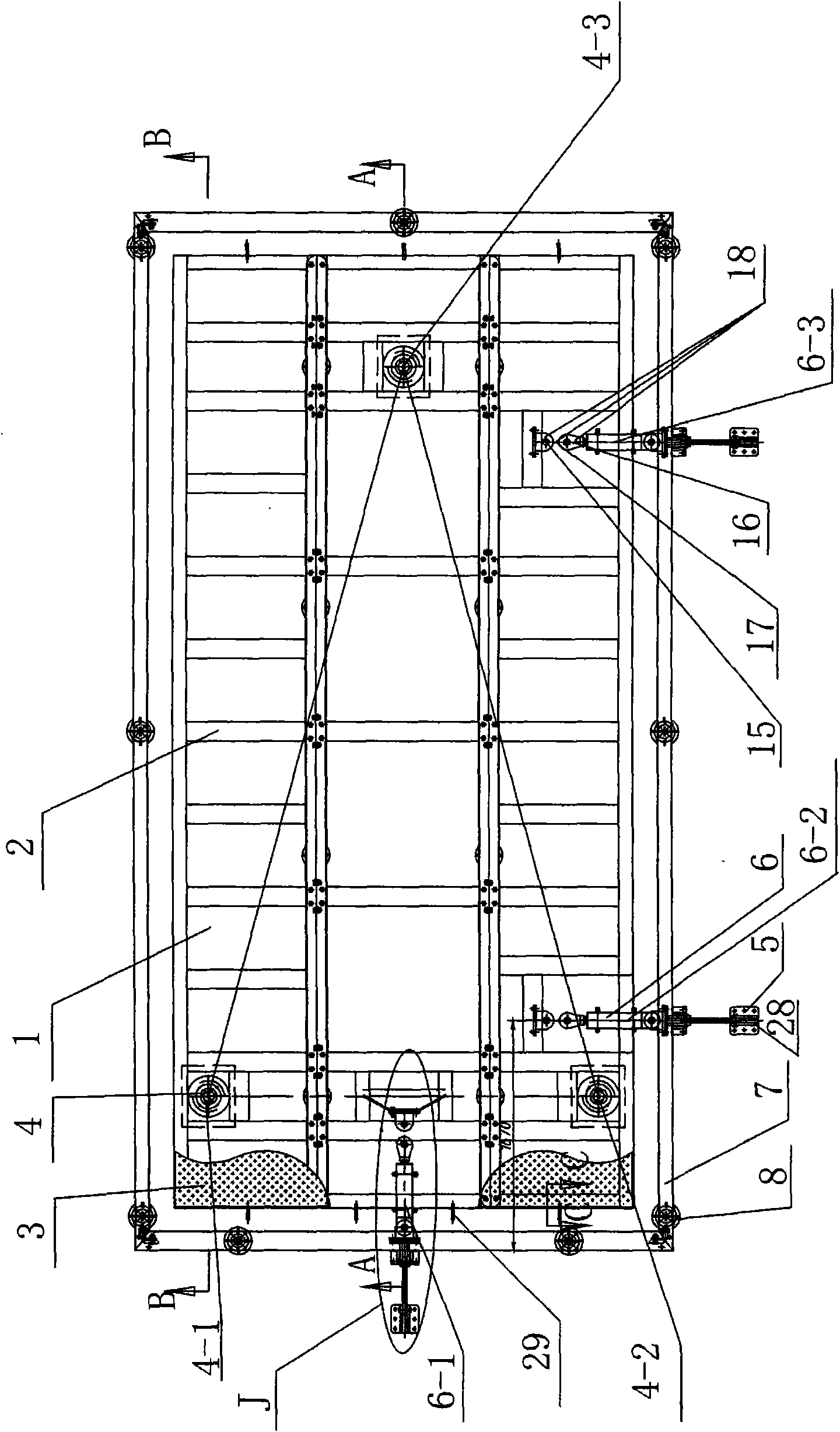
[0029] Such as Figure 1~4 As shown, a platform with six degrees of freedom of movement, the platform 1 is a frame 2 platform, a panel 3 is arranged on the upper surface of the frame 2, and six drive components. Three of the six drive components are lift drive components 4, the upper end of the lift drive component 4 is hinged to the platform 1, the lower end of the lift drive component 4 is hinged to the frame 5, The lifting driving part 4 is arranged in a triangle under the platform 1, and universal joint hinges are respectively arranged at both ends of the lifting driving part 4; the other three of the six driving parts are Translation drive part 6, one end of the translation drive part 6 is parallel or obliquely hinged with the platform 1 at the lower end of the panel 3, the other end of the translation drive part 6 is hinged with the frame 5, and the translation drive part 6 is hinged at the lower end of the panel 3. Both ends of the component 6 are provided with joint ...
Embodiment 2
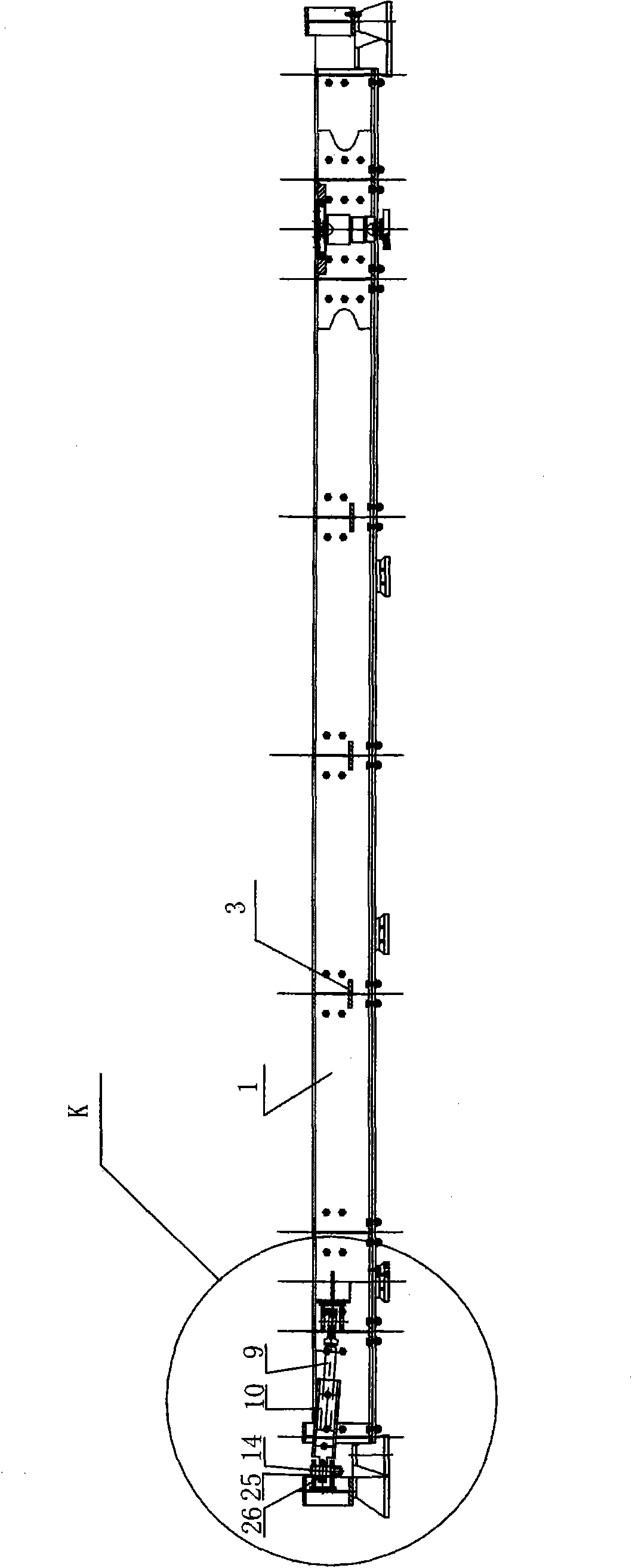
[0031] Such as figure 1 , 2 , 6, on the basis of embodiment 1, a preferred embodiment of the present invention includes that the platform 1 can be a rectangular platform 1, and the rectangular platform 1 can be divided into upper and lower layers, and the frame 2 consists of Several beams and longitudinal beams are spliced together, the panel 3 is laid on the beams and the longitudinal beams, a frame 7 is arranged around the platform 1, and a foot 8 is arranged below the frame 7 , the platform 1 can be controlled to move within the frame 7 .
Embodiment 3
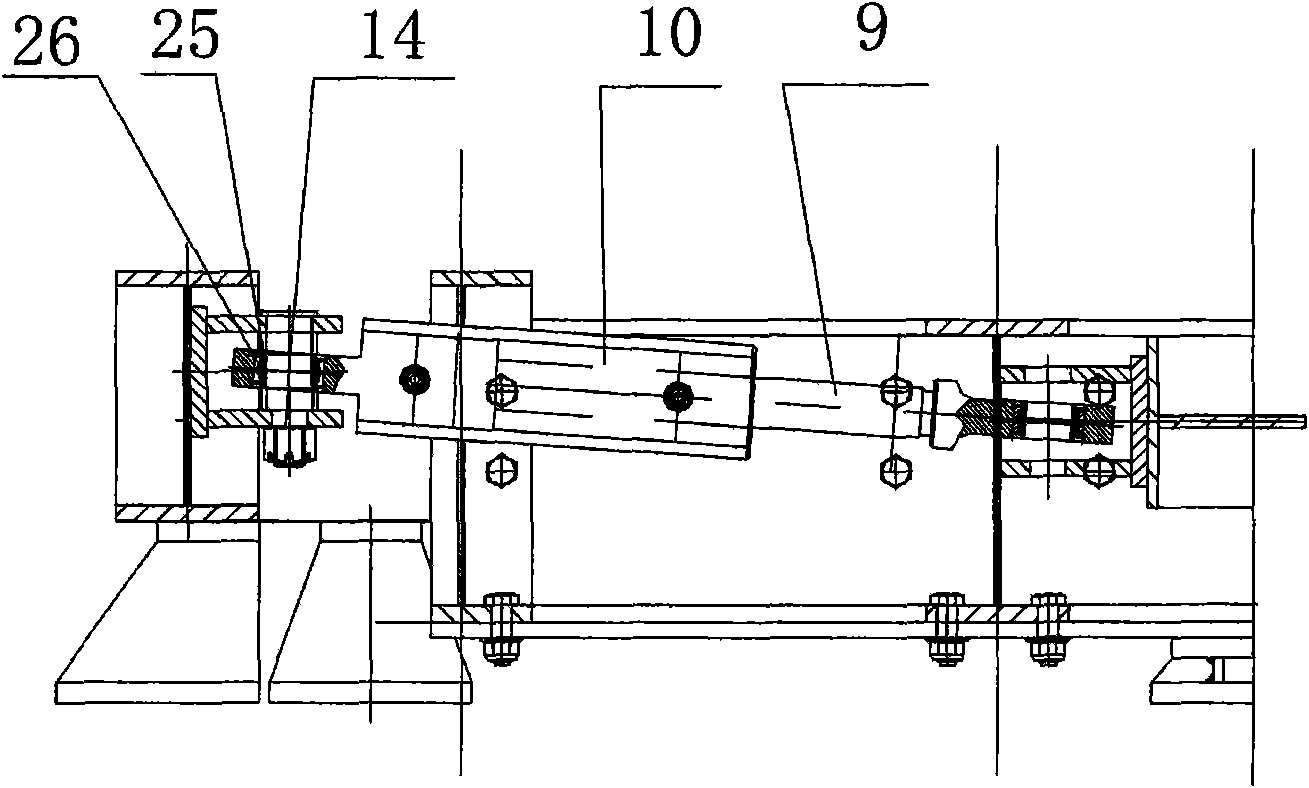
[0033] Such as figure 1 , 3 As shown, on the basis of Embodiment 2, the preferred embodiment of the present invention also includes that the driving component is a piston rod 9 and a cylinder 10 that cooperate with each other, and the piston rod 9 and the cylinder 10 pass through the cylinder 10 The inflow and outflow of gas or liquid in the cylinder can cause relative movement between the piston rod 9 and the cylinder body 10; if the piston rod 9 is used as the driving part, the end of the piston rod 9 can be connected to The platforms 1 are hinged to each other, and the cylinder is hinged to the frame 5 through a hinge; if the cylinder 10 is used as a driving component, the end of the cylinder 10 can be connected to the platform through a hinge 1 are hinged to each other, and the piston rod 9 is hinged to the frame 5 through a hinge.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More