

Method for controlling electrically powered artificial hands by utilizing electro-coulogram and electroencephalogram information
A control method and electronic information technology, applied in prosthetics, electrical digital data processing, special data processing applications, etc., can solve problems such as inaccurate optimization of weight matrix components, neglect of signal elements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
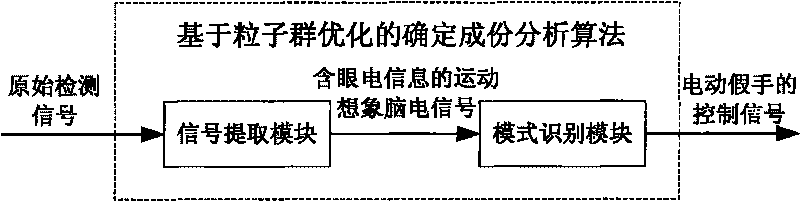
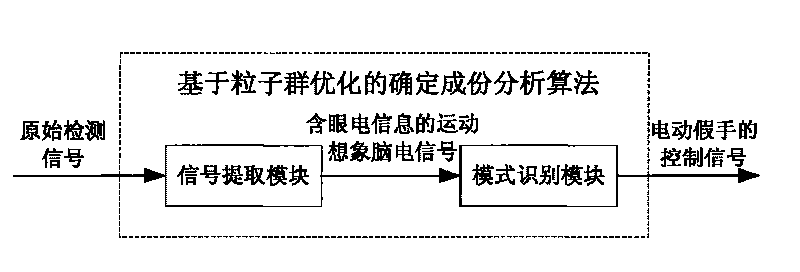
[0055] The present invention selects the electroencephalogram pick-up sensor to collect the electroencephalogram signal including electrooculogram information. Each electroencephalogram pickup sensor includes a scalp pickup electrode and a reference electrode as for the ear, and a primary amplifier circuit connected to the pickup electrode and the reference electrode, and the output terminals of the primary amplifier circuit are respectively connected to the input terminals of the corresponding secondary processing circuit. Connection, the secondary processing circuit includes a 50Hz trap circuit, a post-amplification circuit, and a compensation circuit (used to eliminate common-mode signals). The output end of the secondary processing circuit is connected with the input end of the A / D conversion circuit. The three motors of the three-degree-of-freedom electric prosthetic hand are respectively connected with corresponding drive circuits. The microprocessor is signal-connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More