

Coupling underactuated integrated bionic hand device
A bionic hand and underactuated technology, applied in the field of anthropomorphic robot hands, can solve the problems of inability to achieve natural bending of joints, inability to achieve end pinching, and failure to integrate together, etc., and achieves a wide range of grasping objects, a simple structure, Motion stabilization effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The specific structure and working principle of the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
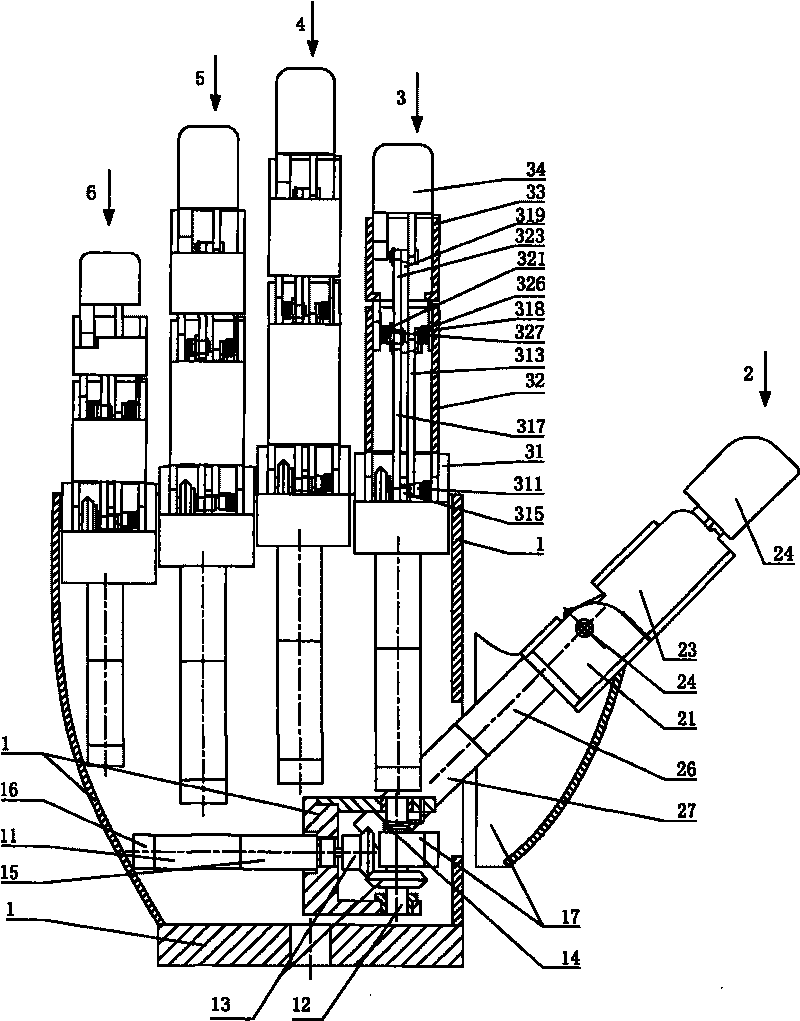
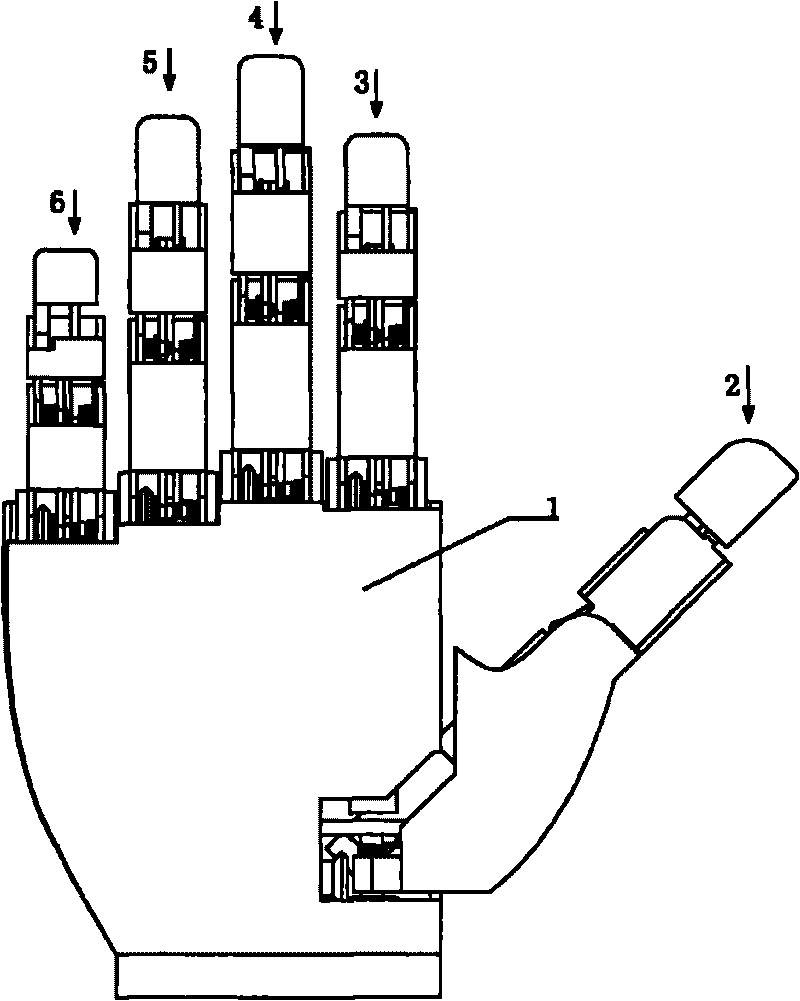
[0091] An embodiment of the coupled and underactuated integrated bionic hand device designed in the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 45 , Figure 46 , Figure 47 , Figure 48 , Figure 49 , Figure 50 and Figure 51 As shown, the bionic hand device includes a thumb 2, an index finger 3, a middle finger 4, a ring finger 5, a little finger 6 and a palm.
[0092] The palm includes a palm skeleton 1, a palm motor 11, a palm joint shaft 12, a palm speed reducer 15, and a palm connecting plate 17; the palm motor 11 and the palm speed reducer 15 are fixedly connected to the palm skeleton 1, and the palm The output shaft of the motor 11 is connected with the input shaft of the palm speed reducer 15, the output shaft of the palm speed re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More