Dynamic response spectrum-based method for planning track of robot with clearance at a joint
A technology of dynamic response and trajectory planning, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as addition, achieve the effect of small calculation and avoid separation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
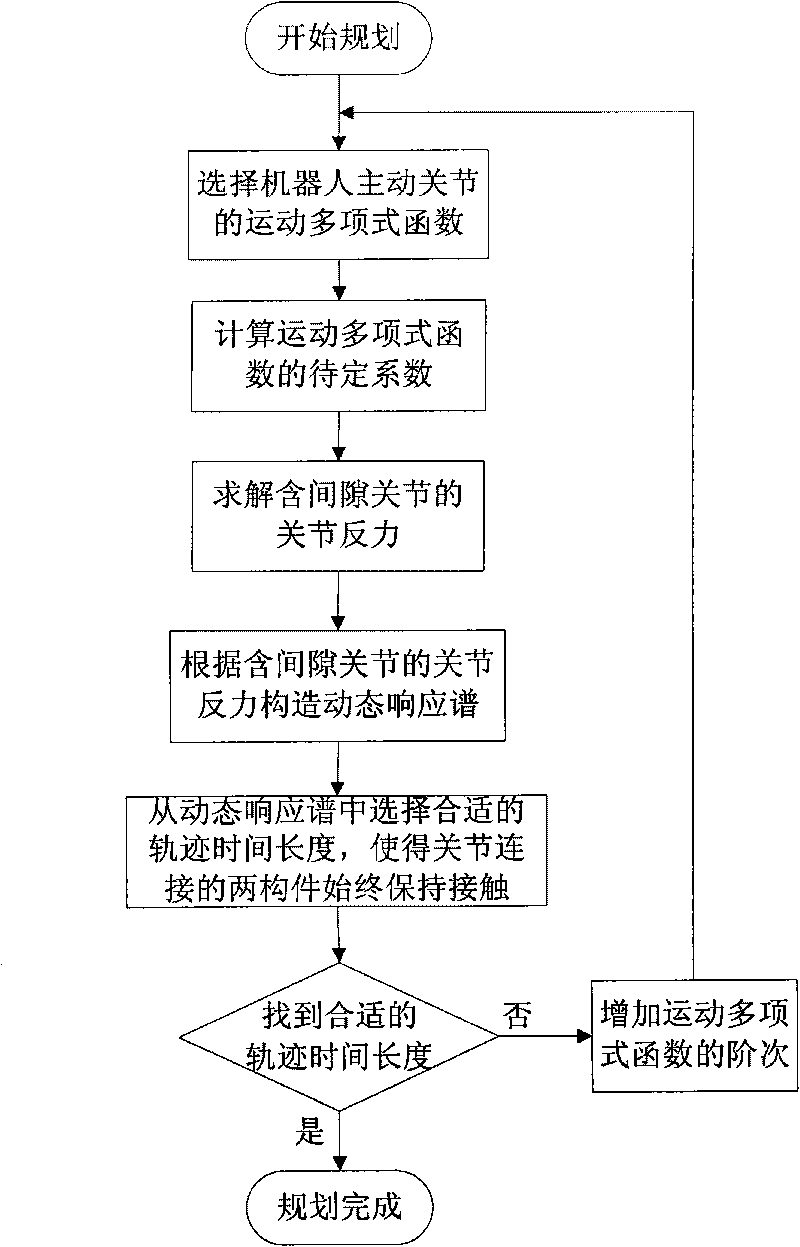
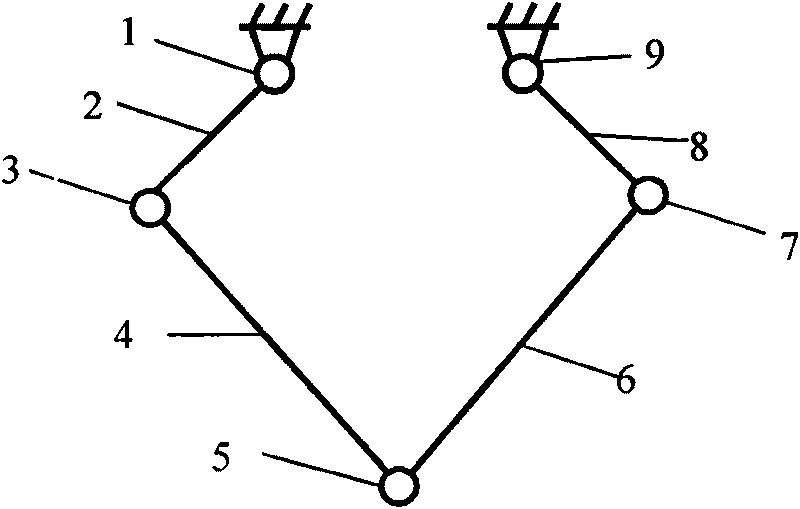
[0031] The present invention will be further described below in conjunction with the 5R robot. The flow chart of the trajectory planning of the robot with gaps in the joints based on the dynamic response spectrum is shown in figure 1 shown, including the following key steps:
[0032] (1) The motion polynomial function selected for the active joint of the robot;
[0033] (2) Calculate the undetermined coefficients of multinomial functions;
[0034] (3) Solve the joint reaction force of joints with gaps;
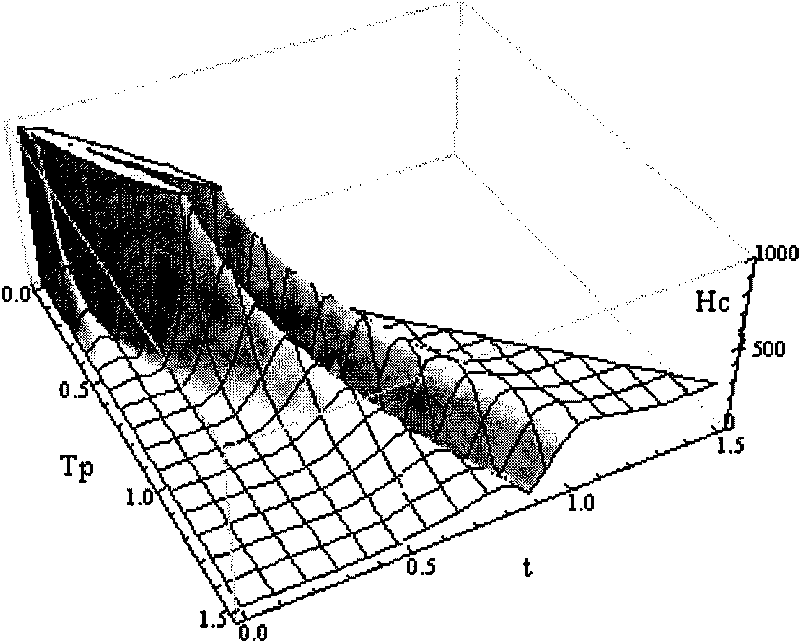
[0035] (4) Construct the dynamic response spectrum according to the joint reaction force of joints with gaps;
[0036] (5) Select an appropriate trajectory time variable from the dynamic response spectrum so that the kinematic pair always keeps in contact;
[0037] (6) If there is no trajectory time variable that meets the requirements in the dynamic response spectrum, increase the order of the trajectory planning polynomial function and return to step (1); otherwise, if a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More