

Two-arm swing obstacle-clearing type line walking robot body
A line-following robot and obstacle-crossing technology, applied in the field of robotics, can solve the problems of lack of mature prototypes and the difficulty of robot research work.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
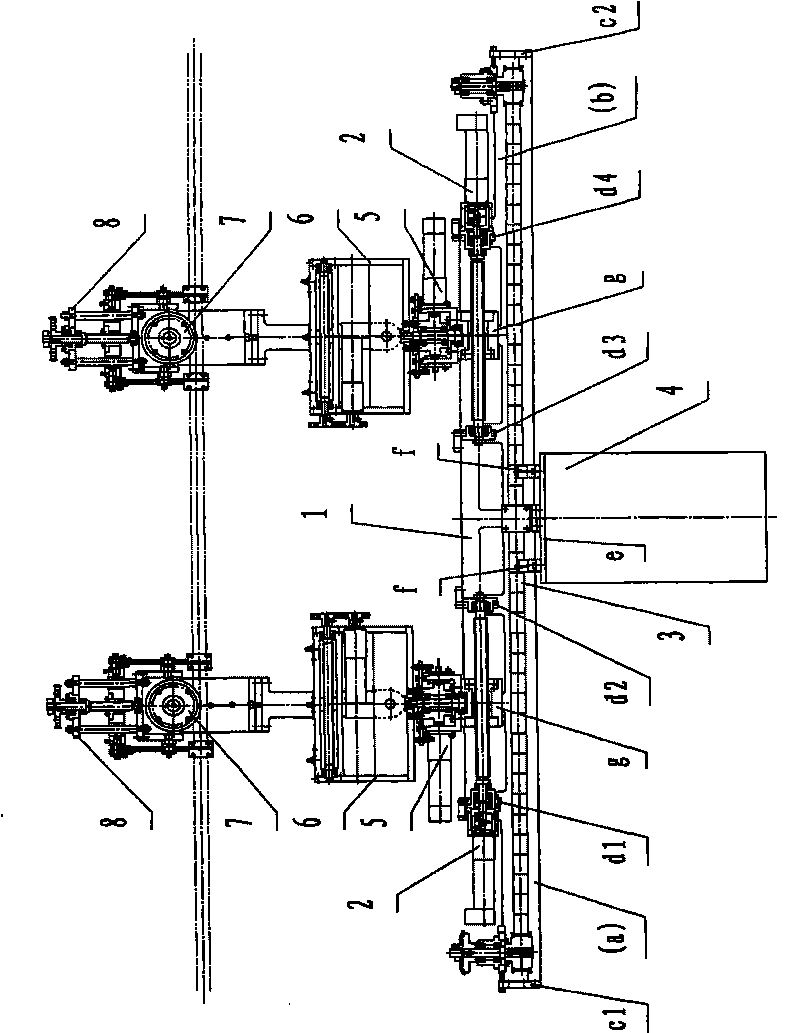
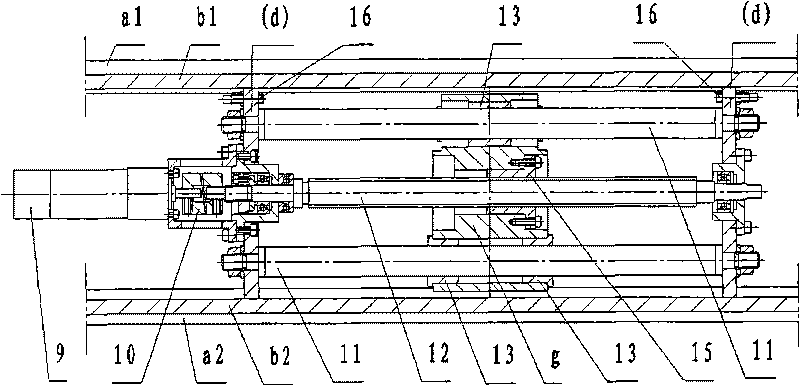
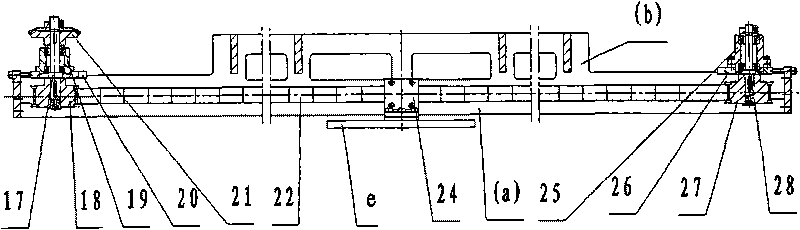
[0046] The following is a detailed description of the dual-arm rotary obstacle-surpassing line inspection robot body of the present invention with reference to the accompanying drawings.
[0047] like figure 1 , figure 2 As shown, the frame 1 is composed of two longitudinal side plates b1, b2 with guide rails a1, a2 on the bottom surface, two transverse end plates c1, c2, four transverse partitions d1, d2, d3, d4 are fixedly connected, and Install a set of lead drag chains on the outer sides of the two side plates b1 and b2; install a limit sensor at both ends of the side plate b1. The longitudinal side panels b1 and b2 are parallel to each other and set vertically, and the four transverse partitions d1, d2, d3 and d4 are orthogonal to the longitudinal side panels b1 and b2 and fixed at equal distances on the inner sides of the longitudinal side panels b1 and b2 In the upper part, a set of arm spacing adjustment parts 2 is installed between the transverse partitions d1 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More