

Underwater guide capture device of remote-operated vehicle
A technology of remote-controlled submersibles and capture devices, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problem of increasing the propulsion power burden of underwater mobile platforms, increasing the carrying weight of underwater mobile platforms, relay stations or recovery cage structures Complicated problems, to achieve the effect of reducing the carrying weight, light weight and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
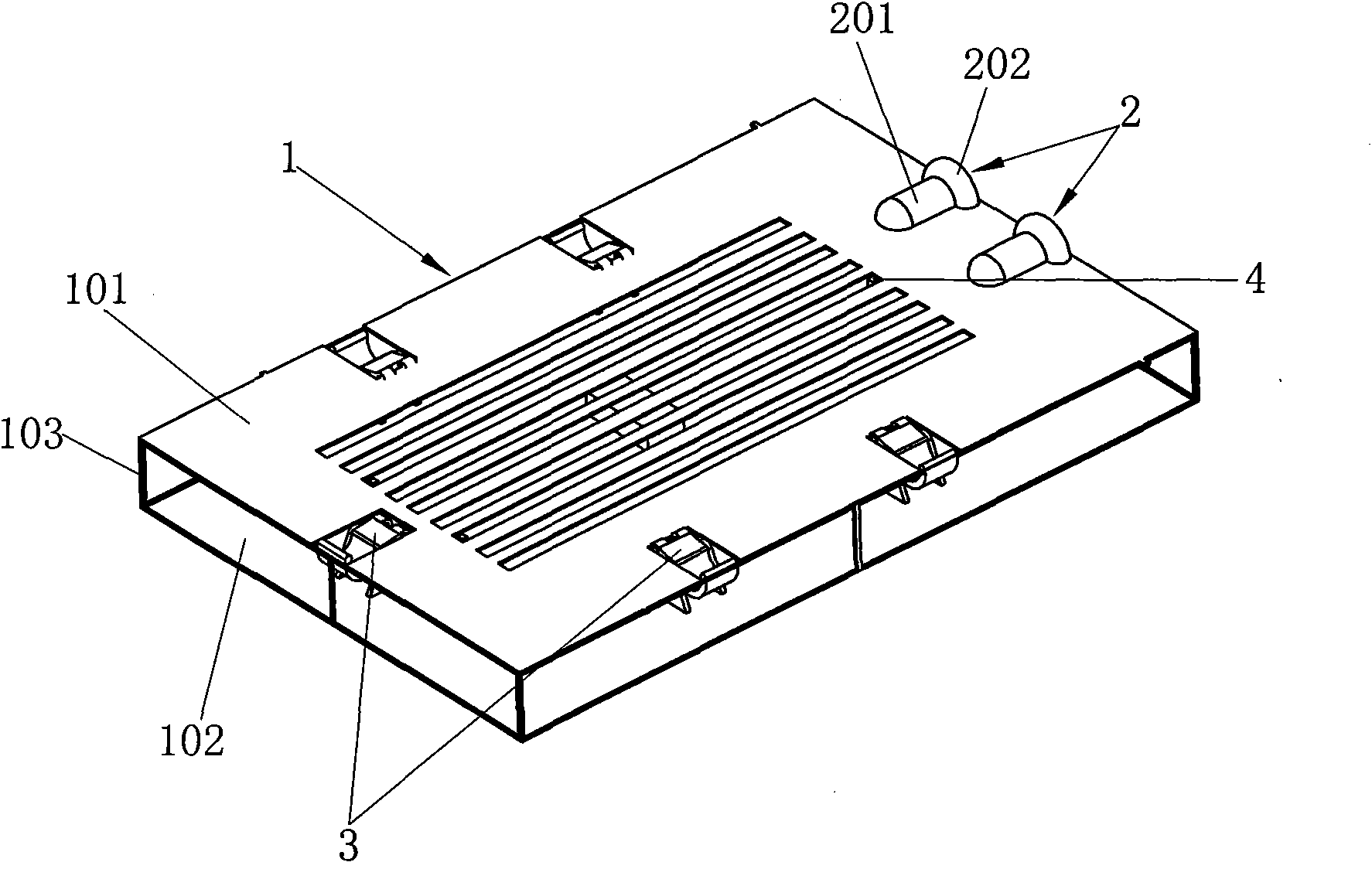
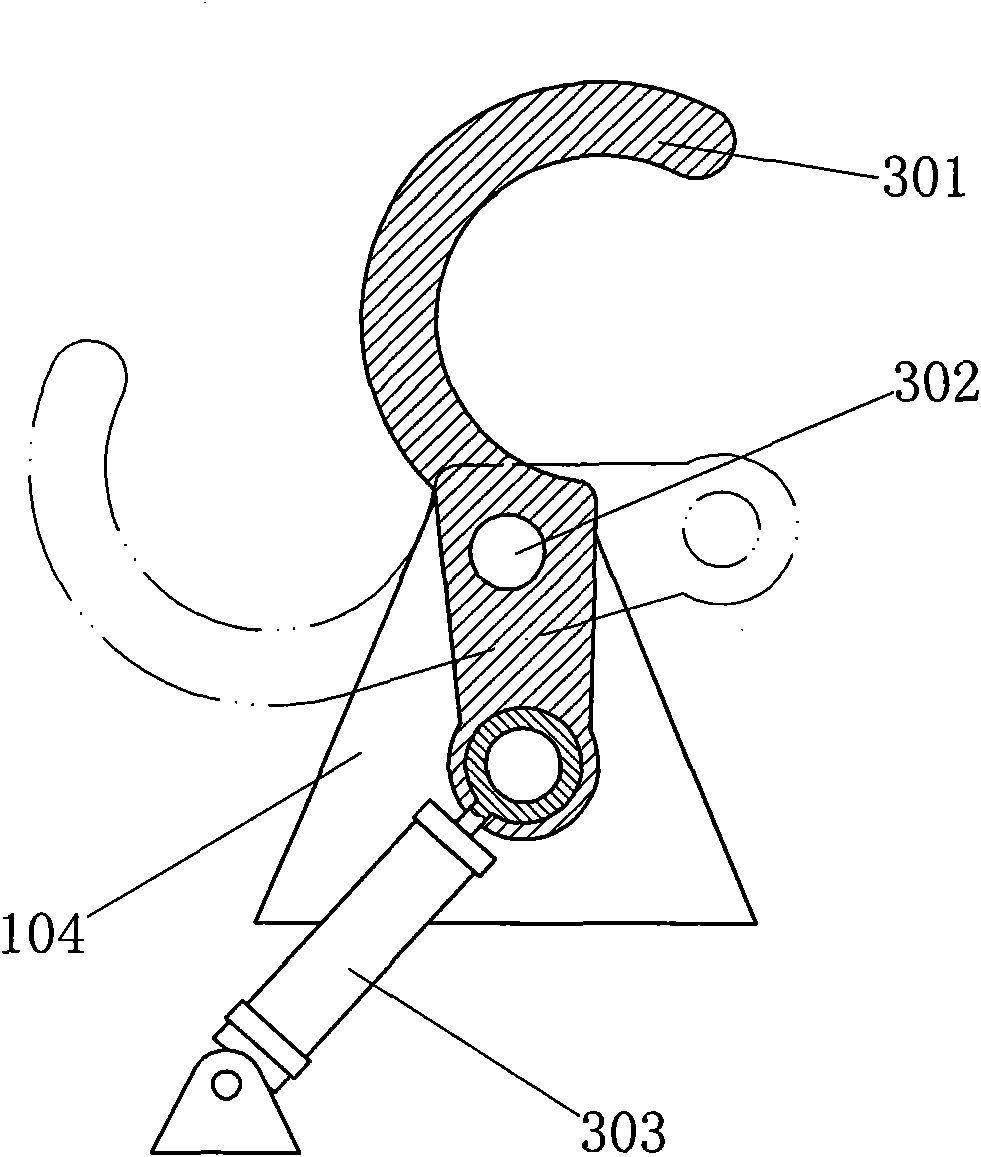
[0020] Such as figure 1 , 2 , 3A, 3B, and 3C, the present invention includes a platform 1, the platform 1 is a hollow two-layer structure, and the upper layer 101 and the lower layer 102 are connected and supported by struts 103. The front part of the upper layer 101 of the platform 1 is provided with two guiding and positioning blocks 2, and usually at least one guiding and positioning block 2 needs to be set on the platform 1, and the guiding and positioning blocks 2 guide and position the ROV on the platform. The guiding and positioning block 2 is a semi-revolving body. The guiding and positioning block 2 is composed of a guiding section 201 and a locking section 202. The diameter of the guiding section 201 remains unchanged, and the diameter of the locking section 202 gradually increases from the inside to the outsi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More