

Robot limb muscle device
A robot and muscle technology, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of high manufacturing cost, complex structure, large volume, etc., and achieve the effect of simple structure and reduced energy consumption
Inactive Publication Date: 2010-10-06
杨柏
View PDF5 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Robot limbs with this structure generally have the disadvantages of complex structure, high manufacturing cost and large volume.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
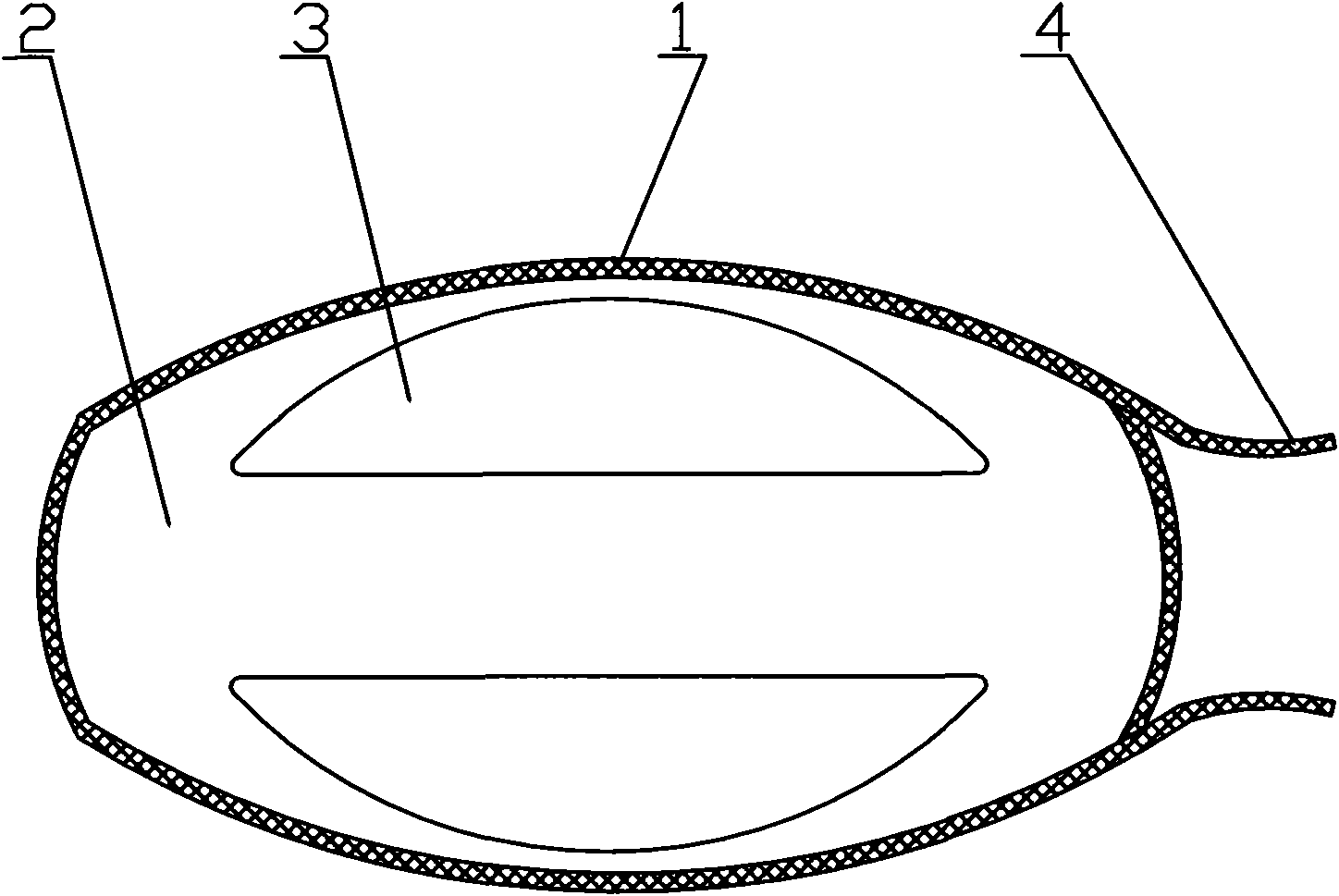
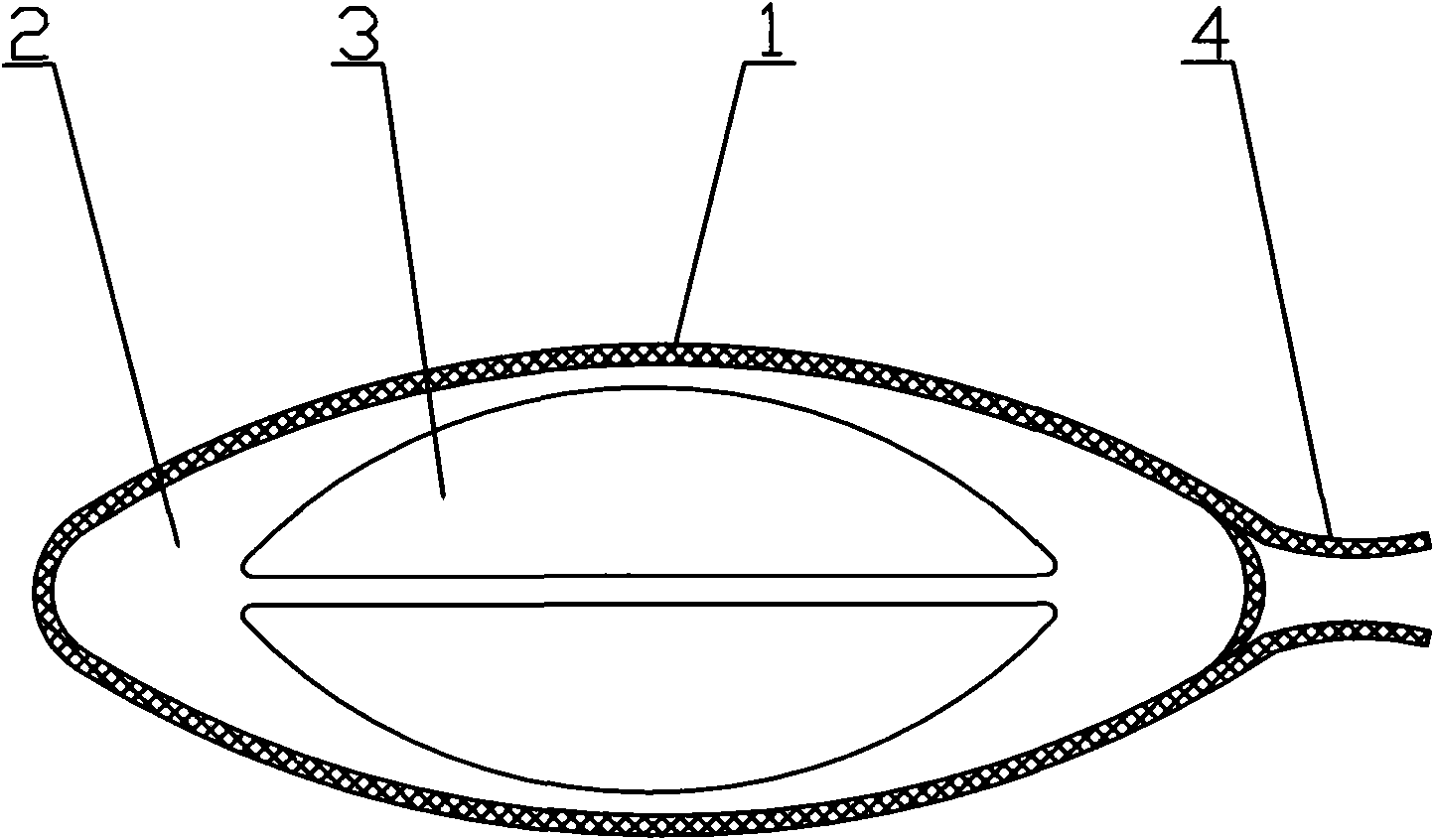
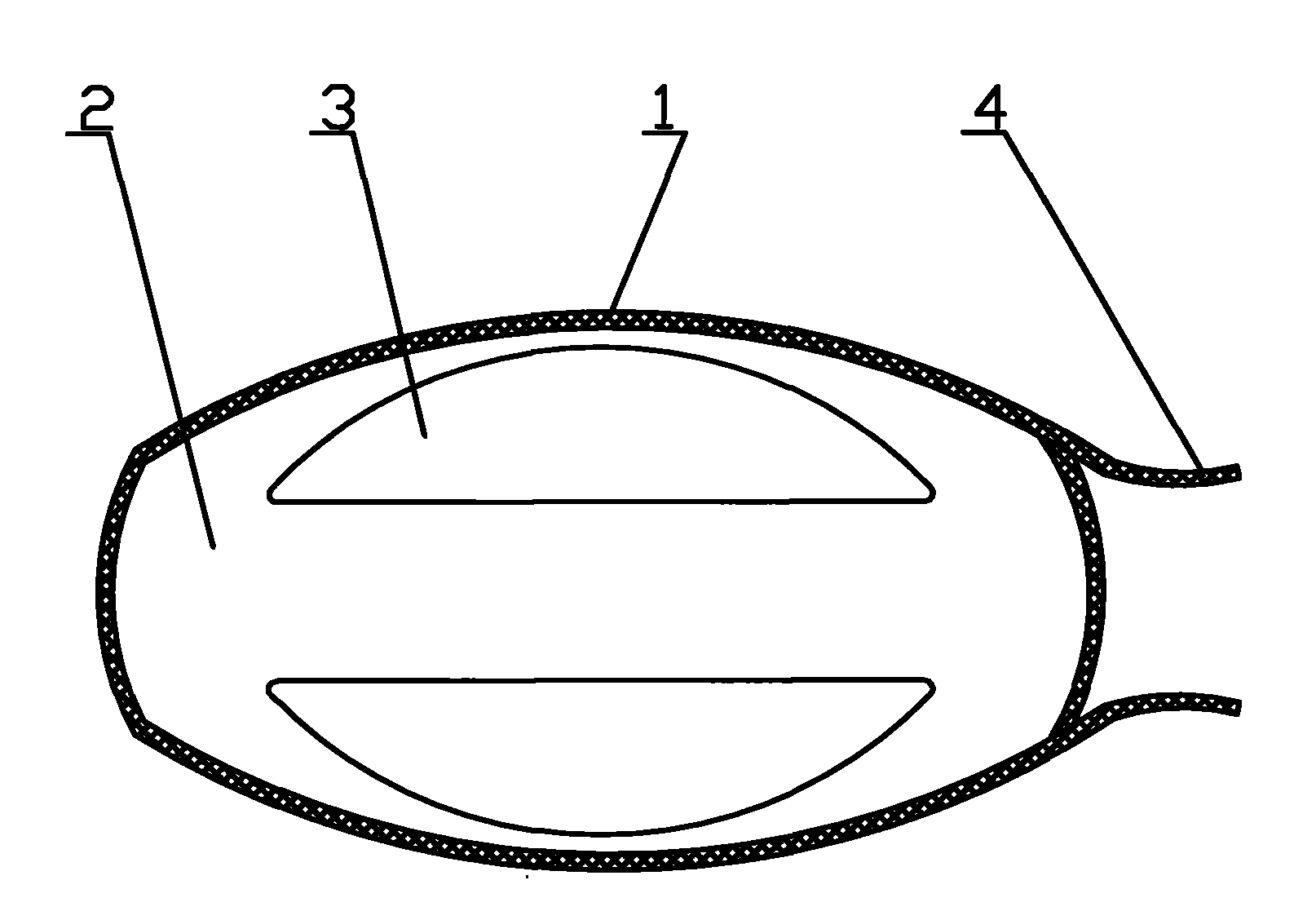
[0009] like figure 1 and figure 2 As shown, the present embodiment mainly comprises muscle skin bag 1, and muscle skin bag 1 is made of rubber with certain toughness and strength, and muscle skin bag 1 is sealed to form capsule cavity 2, is provided with a pair of electromagnet 3 opposite to the same magnetic pole in capsule cavity 2, The electromagnet is powered by a power supply, and is controlled by the control system to open, close, and change magnetic poles. One end of the muscle skin bag 1 is also provided with several connecting ends 4. The connecting ends 4 can be used to connect steel wires similar to human tendons. Control the robot finger to work.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a robot limb muscle device, and aims to provide a robot limb muscle device which has the advantages of simple and compact structure and low manufacturing cost. The device mainly structurally comprises a muscle bladder and a pair of opposite electromagnets with the same magnetic pole, which are wrapped in the muscle bladder, drives the muscle bladder to expand and contract through the homopolar exclusive power of the electromagnets so as to drive the fingers of a robot to act. The robot limb muscle device has the advantages of simple and compact structure and little energy consumption.
Description
technical field [0001] The invention relates to a robot limb muscle device. Background technique [0002] At present, there are many humanoid robots in the world, but the limbs of all humanoid robots are composed of a large number of metal components through certain connections, driven by motors or hydraulic systems, and realize the function of imitating human arms. Robot limbs with this structure generally have the disadvantages of complex structure, high manufacturing cost and large volume. Contents of the invention [0003] The purpose of the present invention is to provide a robot limb muscle device with simple structure, compact structure and low manufacturing cost. [0004] The technical solution adopted in the present invention is: a robot limb muscle device, mainly comprising a muscle skin bag, the muscle skin bag is made of a material with a certain toughness, the muscle skin bag is sealed to form a cyst cavity, and a pair of same Electromagnets with opposite ma...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J19/00B25J18/00
Inventor杨柏
Owner杨柏