

Method for controlling stop of animal robot
An animal robot, microcontroller technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve problems such as limiting the practicability of animal robots, and achieve the effect of convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
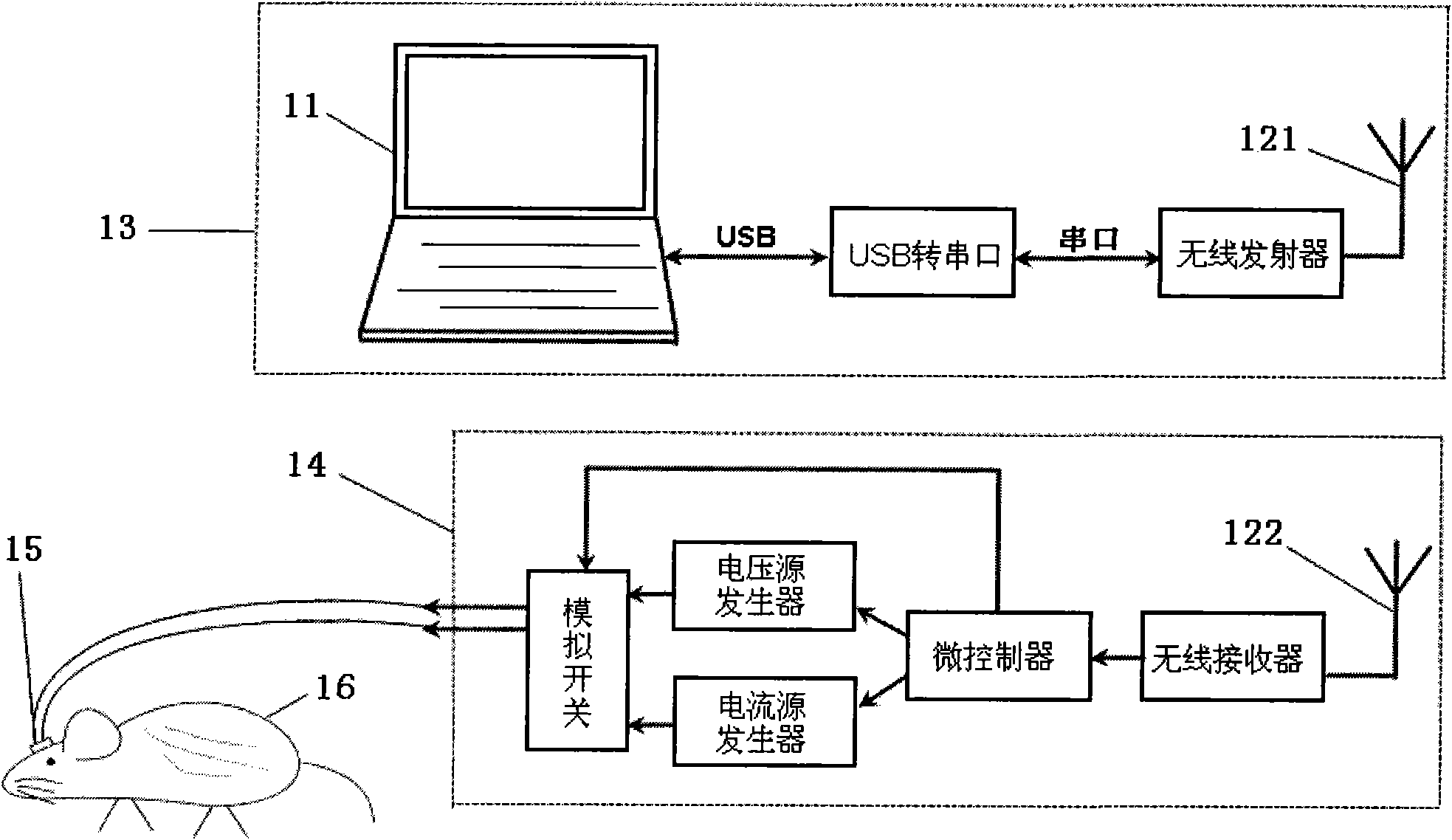
[0020] The present invention is used to control the stopping method of animal robots. By electrically stimulating the gray matter (PAG) nerve nucleus around the midbrain aqueduct of the animal, the animal generates a sense of virtual fear, thereby inducing an active defense response and realizing the control of the animal robot to stop moving purpose.
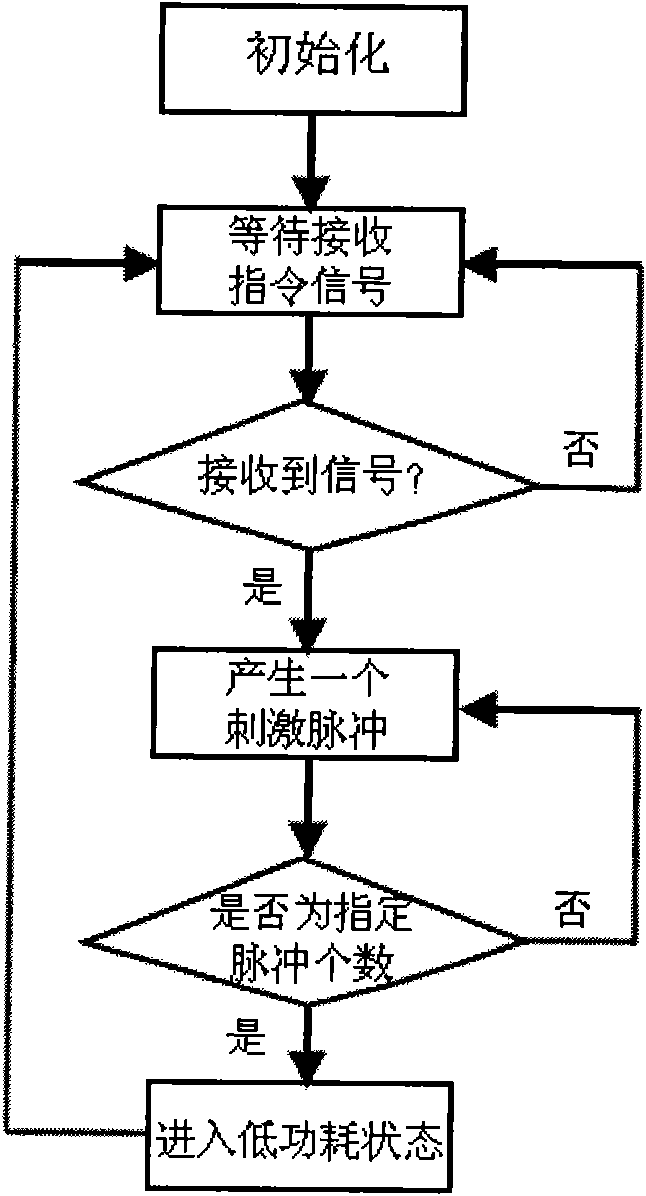
[0021] In order to realize the system for controlling the stop of the animal robot of the present invention, the wireless transmitter in the transmitting base station 13 sends a stimulation command for stimulating the animal robot to the backpack circuit 14 placed on the body of the animal robot through the transmitting antenna 121. After the wireless receiver receives the command signal through the receiving antenna 122, it transmits the received stimulation command to the microcontroller. The microcontroller generates a stimulation pulse signal according to the stimulation command and sends the stimulation pulse signal to the ani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More