

Adaptive industrial process optimal control system and method
An industrial process and optimal control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of finding the optimal solution and poor applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
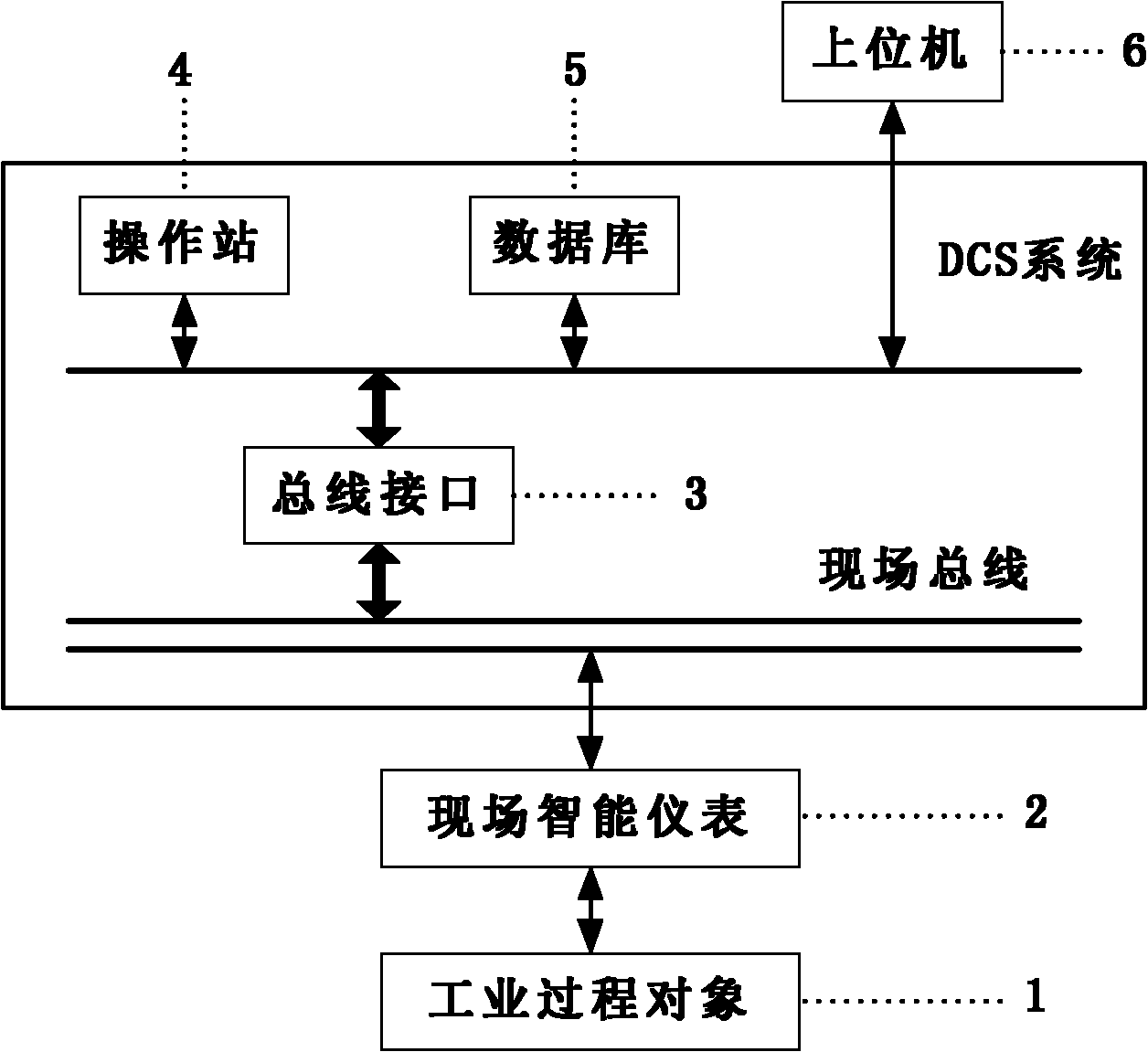
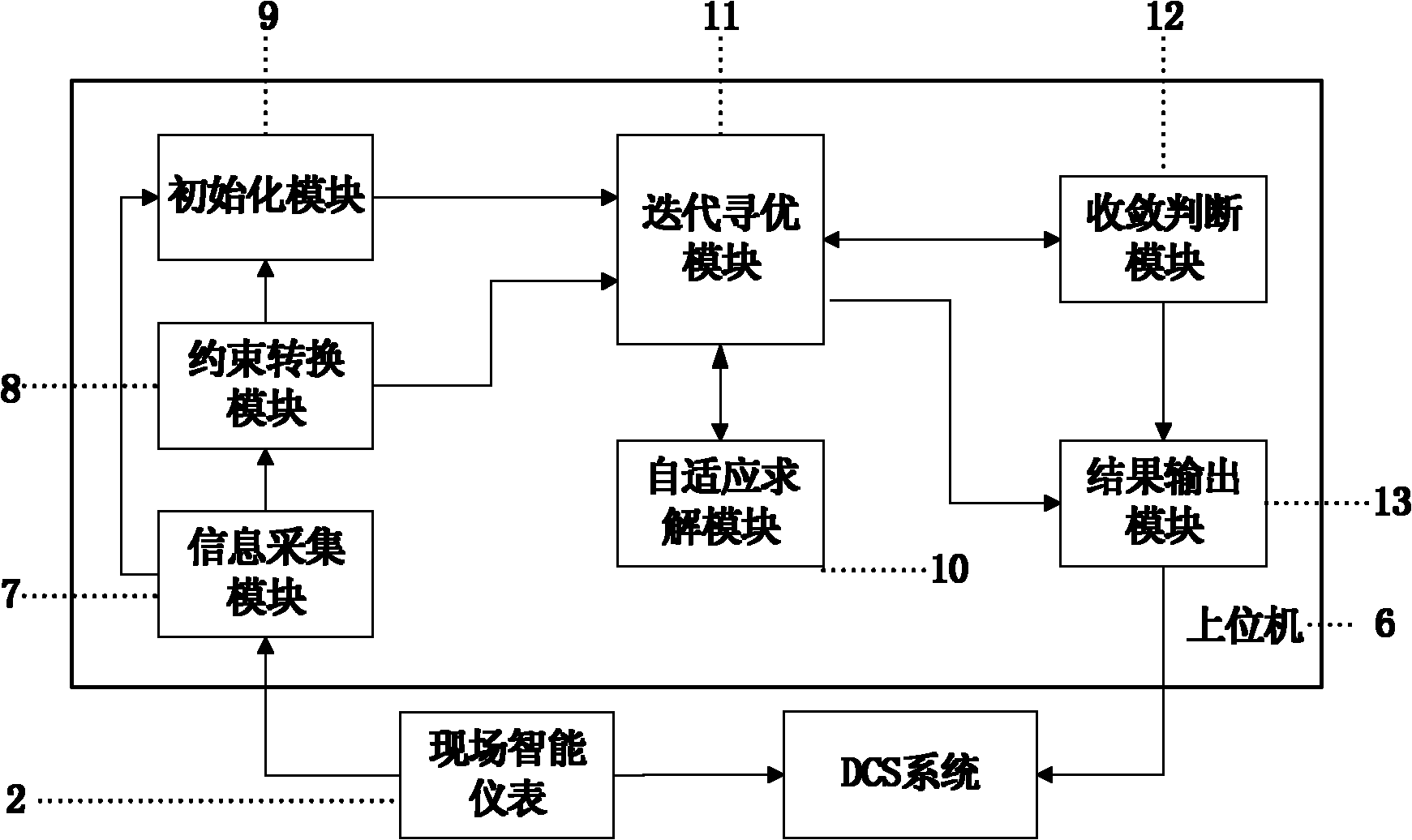
[0093] refer to figure 1 , figure 2 , an adaptive industrial process optimal control system, including a field smart instrument 2 connected to an industrial process object 1, a DCS system and a host computer 6, and the DCS system is composed of a bus interface 3, an operation station 4, and a database 5 The on-site intelligent instrument 2, the DCS system, and the host computer 6 are connected successively through the field bus, and the host computer includes:
[0094] Initialization module 9 is used for setting initial parameters, optimizing the discretization and initial assignment of variable z(t), and the specific steps are as follows:
[0095] (3.1) The time domain [t 0 , t f ] divided into n subsections on average: [t 0 , t 1 ], [t 1 , t 2 ],...,[t n-1 , t n ], where t n = t f ; The length of each time period is h=(t f -t 0 ) / n;
[0096] (3.2) Discretize the optimization variable z(t) in the time segment described in (3.1), replace z(t) with a variable z (th...
Embodiment 2
[0135] refer to figure 1 and figure 2 , an adaptive industrial process optimal control method, the optimal control method is implemented according to the following steps:
[0136] 1) Specify the state variables and control variables in the DCS system, and set the upper and lower boundaries u of the control variables according to the conditions of the actual production environment and operating restrictions max , u min and the sampling period of the DCS, and the historical data of the corresponding variables in the DCS database 5, the upper and lower boundary values of the control variables u max , u min Send it to the host computer 6.
[0137] 2) In the constraint conversion module 8 of the host computer, the control variable u(t)∈[u min , u max ] into a function expression of another unconstrained variable z(t), namely:
[0138]u(t)=0.5(u max -u min )×{cos[z(t)]+1}+u min (1)
[0139] Then, z(t) is used as the optimization variable for optimization...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More