

Control method of coordinated movement of multiple cylinders of submersible omnibearing propeller
A coordinated movement and all-round technology, applied in the direction of control, transportation and packaging, and ships using feedback, to achieve the effects of reducing motion deviation, improving servo accuracy, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
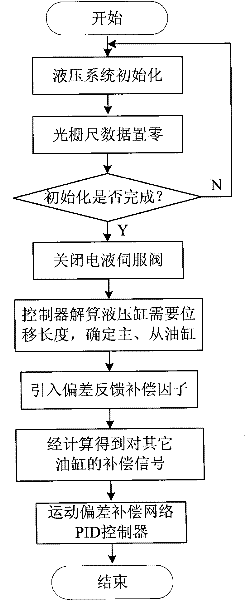
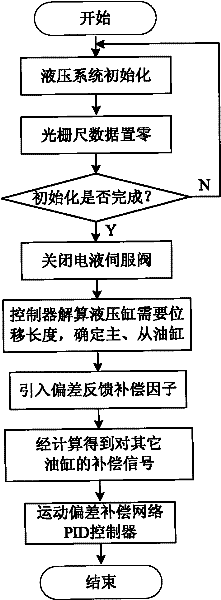
[0017] The present invention is described in more detail below in conjunction with accompanying drawing example:
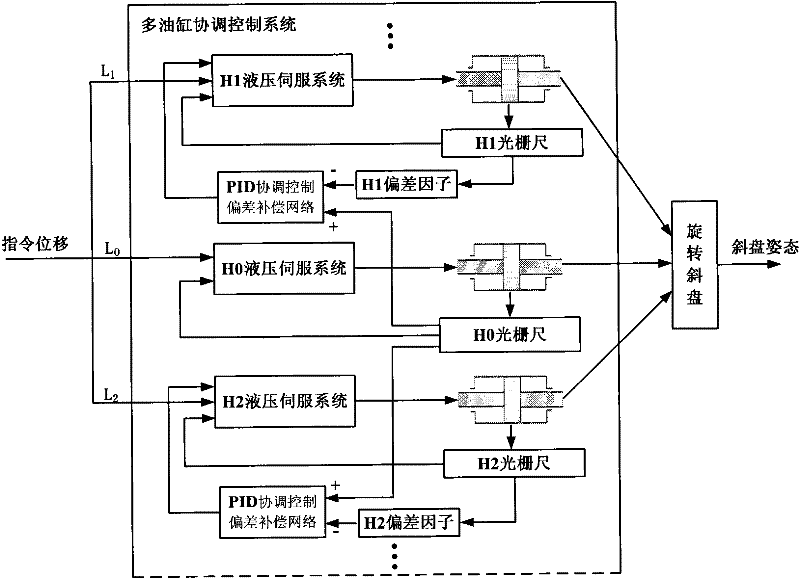
[0018] combine figure 1 , the working process of the present invention is: when the system is started, first initialize the hydraulic system, and after the initialization of the hydraulic system is completed, the controller will clear the data of the grating ruler and the system will start to work normally; According to the motion requirements, the displacement and inclination angle of the swash plate are calculated, and converted into the displacement length required by each hydraulic cylinder, and the hydraulic cylinder with the smallest moving amount is used as the reference, and it is used as the master hydraulic cylinder, and the others are slave cylinders; Rigidly connected hydraulic cylinders are constrained by satisfying the plane, so the deviation feedback compensation factor is introduced to eliminate the data inconsistency problem during deviation feedb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More