

Autonomous intelligent detection multi-robot system for mine
A multi-robot, autonomous intelligence technology, applied in the domain field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation of the present invention will be further described in detail below with reference to the accompanying drawings.
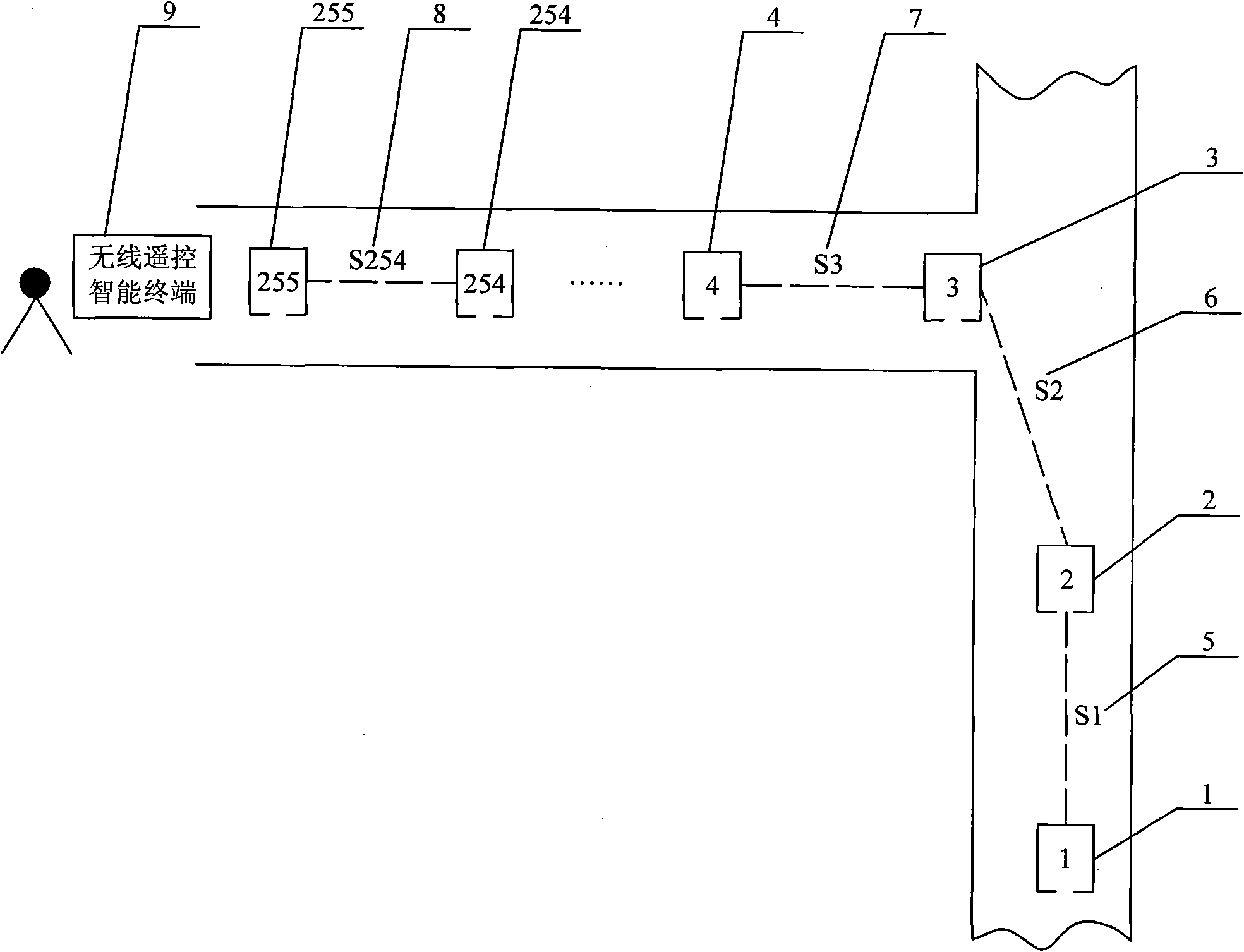
[0028] According to the attached figure 1 , The structure diagram of the multi-robot system for autonomous and intelligent detection of mines of the present invention. The multi-robot system is a space-distributed robot system. In the multi-robot system, the sub-robots are identical in structure, and each sub-robot moves autonomously and intelligently. The work formation of the multi-robot system is automatically adjusted by the sub-robots according to the environment. The sub-robots communicate through the wireless network, and the intelligent communication coordination module ensures that the sub-robots of the wireless network-based mine autonomous and intelligent detection multi-robot system can work together. It can be seen from the figure that the multi-robot system for autonomous and intelligent mine detection based on wireless...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More