

Intelligent navigation control system and method
A control system and intelligent navigation technology, applied in two-dimensional position/channel control, road network navigator, etc., to achieve good versatility, simple structure, and strong integration capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
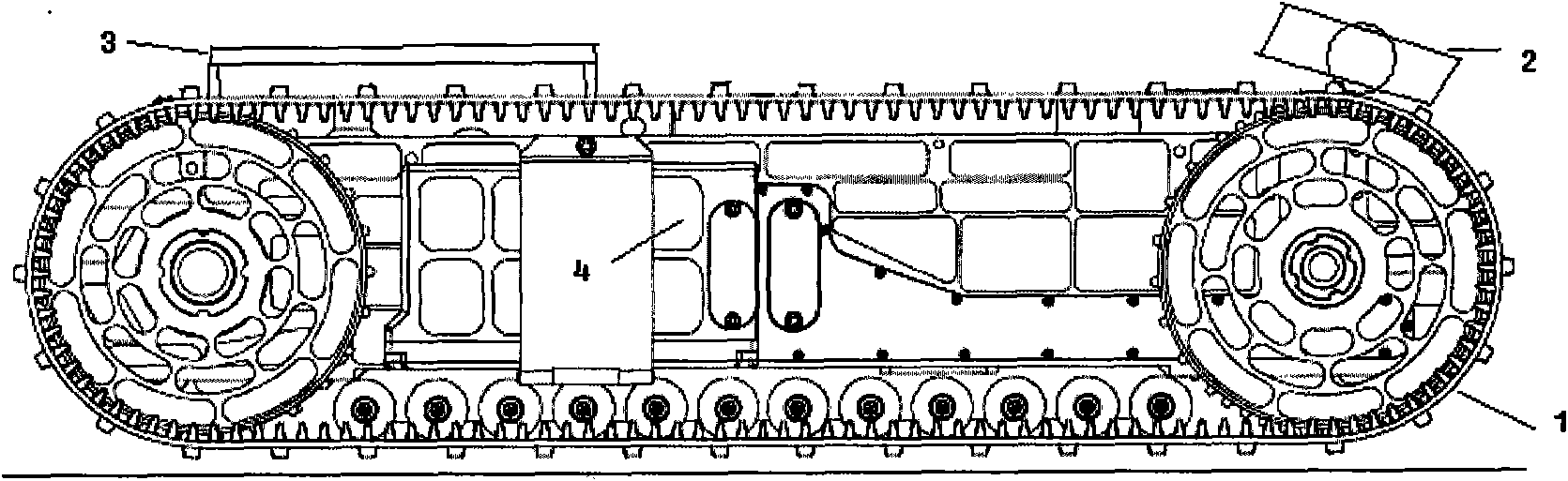
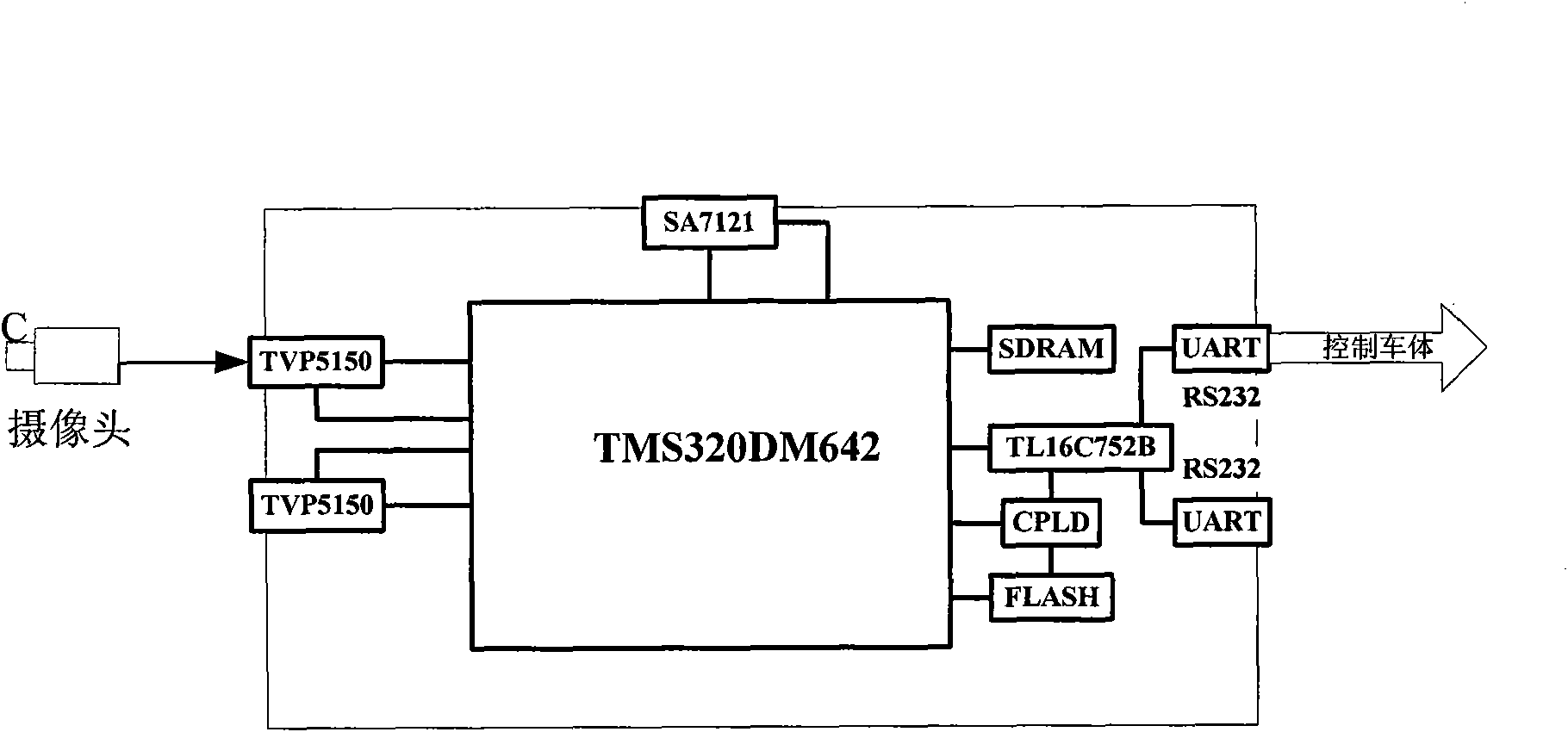
[0054] First, describe the intelligent navigation control system provided by the technical solution of the present invention, as figure 1 and Figure 5 As shown, the control system includes a host computer and a mobile robot platform 1, and the host computer includes a computer and a wireless communication device. The image / video data transmission between machine and mobile robot platform, described mobile robot platform comprises mobile robot body, wireless communication module 3, image extraction unit, embedded processing platform and robot body power supply module 4, and described embedded processing platform Including analog-to-digital conversion unit, image processing unit and navigation control unit;
[0055] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More