

Portable pipeline automatic circumferential walking device and pipeline processing method
A kind of walking equipment and portable technology, which is applied in the field of portable pipe automatic circular traveling equipment and pipeline processing, can solve the problems of wheel deviation, easy aggravation, magnetic force reduction, etc., achieve ultra-high walking accuracy, convenient control mode, and prolong service life Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
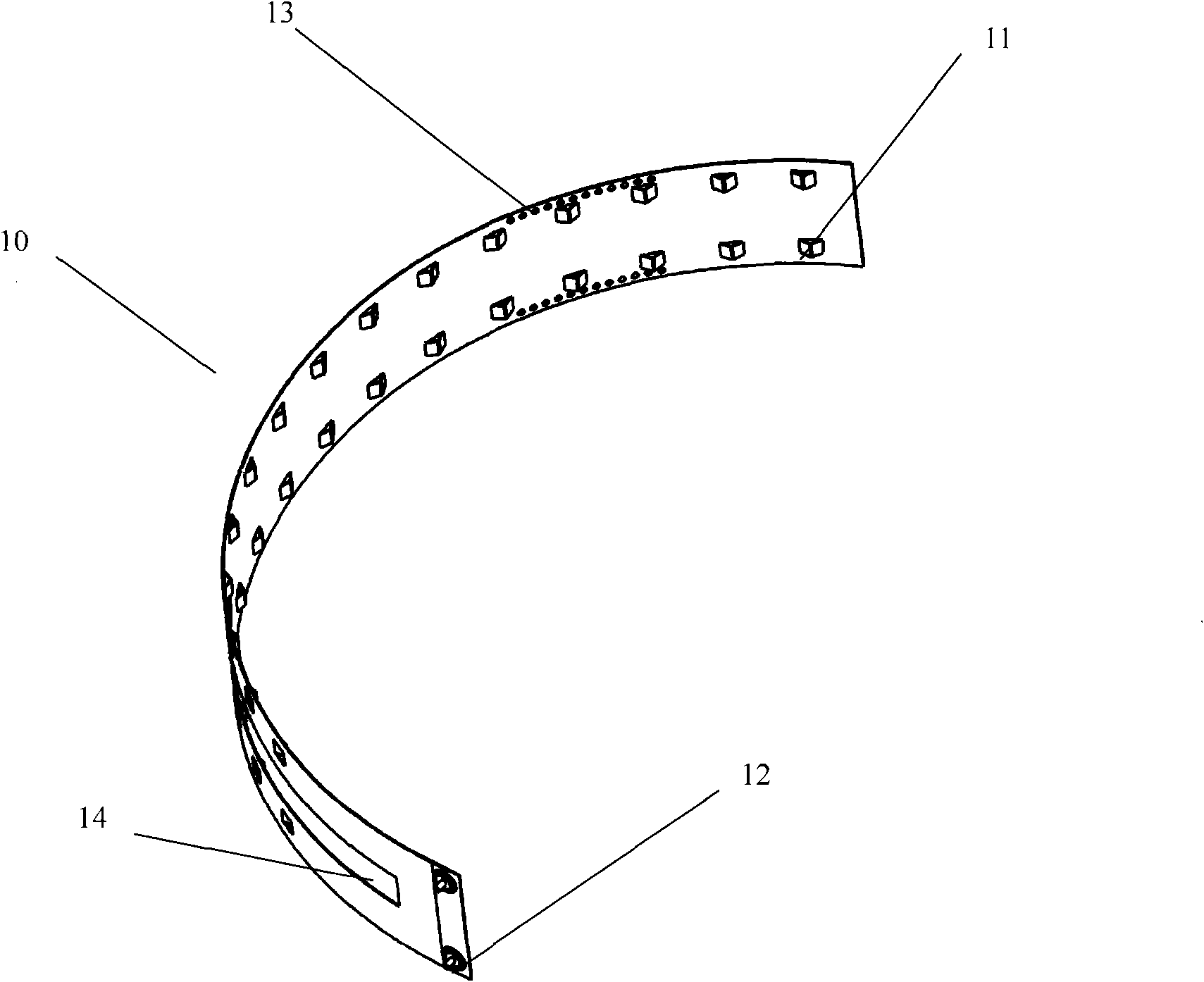
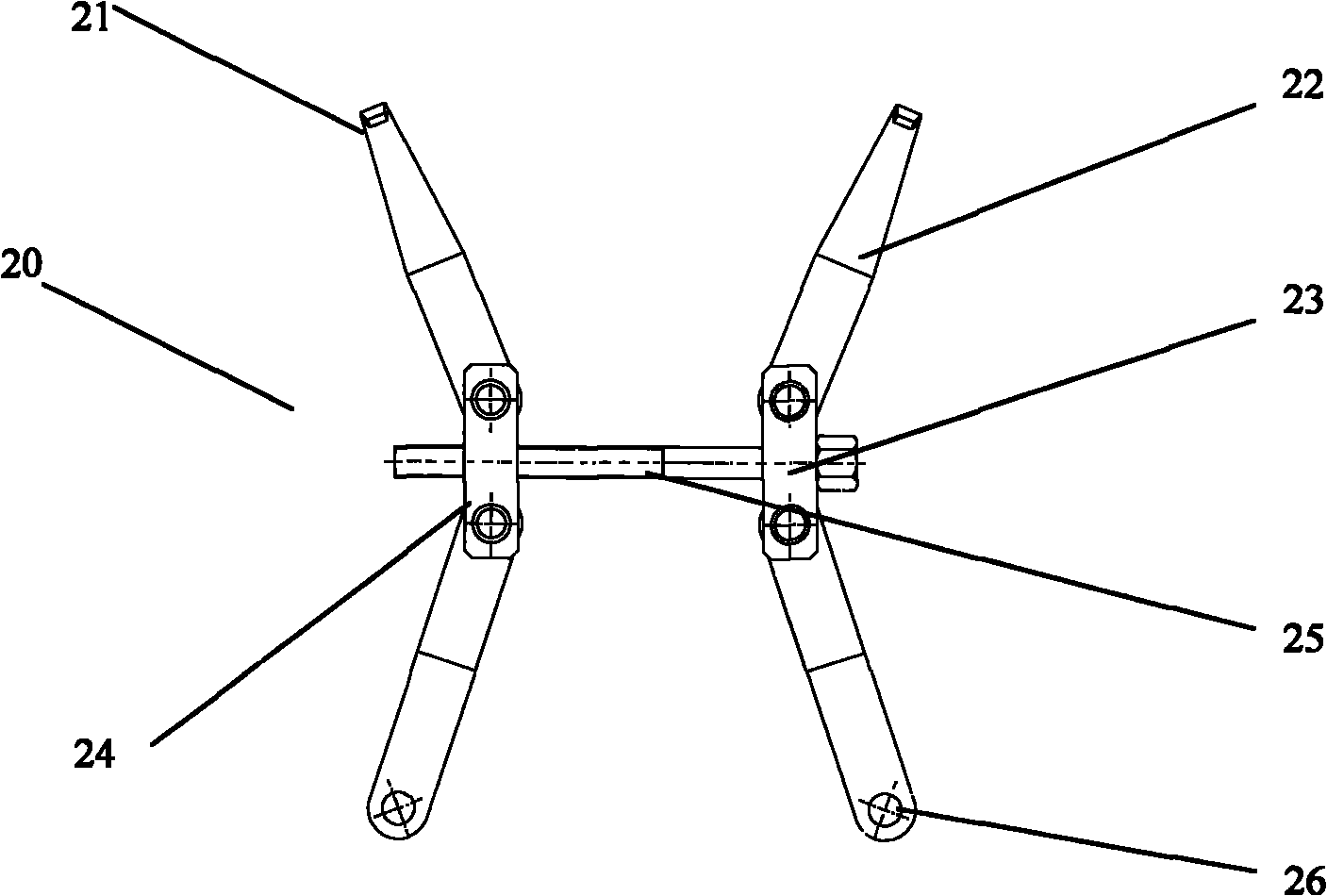
[0018] The present embodiment is made up of circular track part, traveling mechanism part, control part. Wherein the circular track part is composed of track 10 (see figure 1 ), and the claws 20 for the installation track (see figure 2 )composition. The track 10 is made of thin plates of different lengths, and the thin plates have the ability to undergo plastic deformation, and can be bent into different radians as required to adapt to pipes of different diameters. Several grooves 11 are distributed along the length direction of the track. One end of the track 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More