

Inner system for controlling gestures of underwater robot
A technology of underwater robots and control systems, applied in attitude control, underwater operation equipment, ships, etc., can solve problems such as inability to achieve roll and pitch control, difficulty in achieving real-time rapid stability, and difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] A preferred embodiment of the present invention is described in detail as follows in conjunction with accompanying drawing:
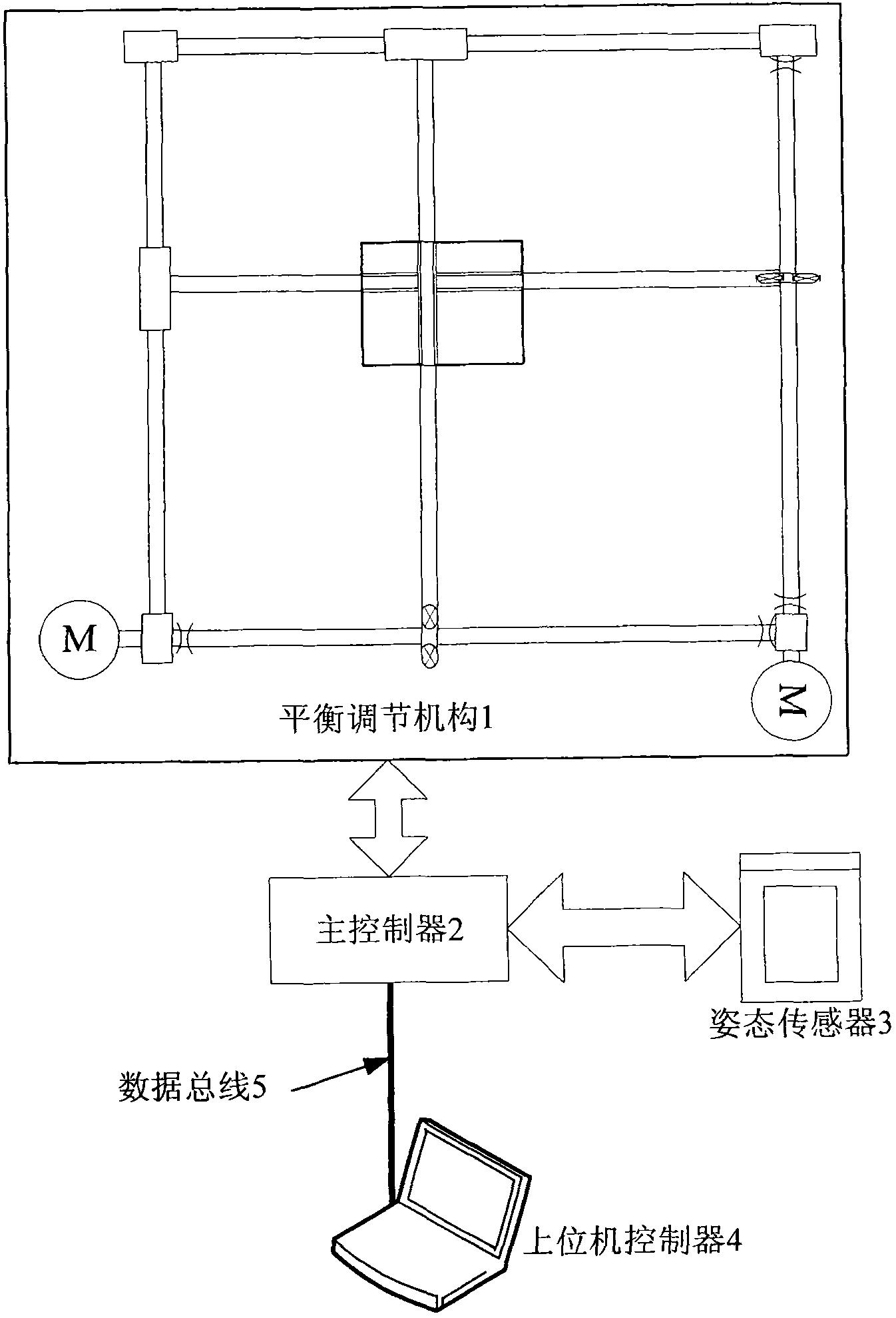
[0021] Such as figure 1 As shown, the attitude control system of the underwater robot includes: a balance adjustment mechanism 1, a main controller 2, an attitude sensor 3 and a host computer controller 4;
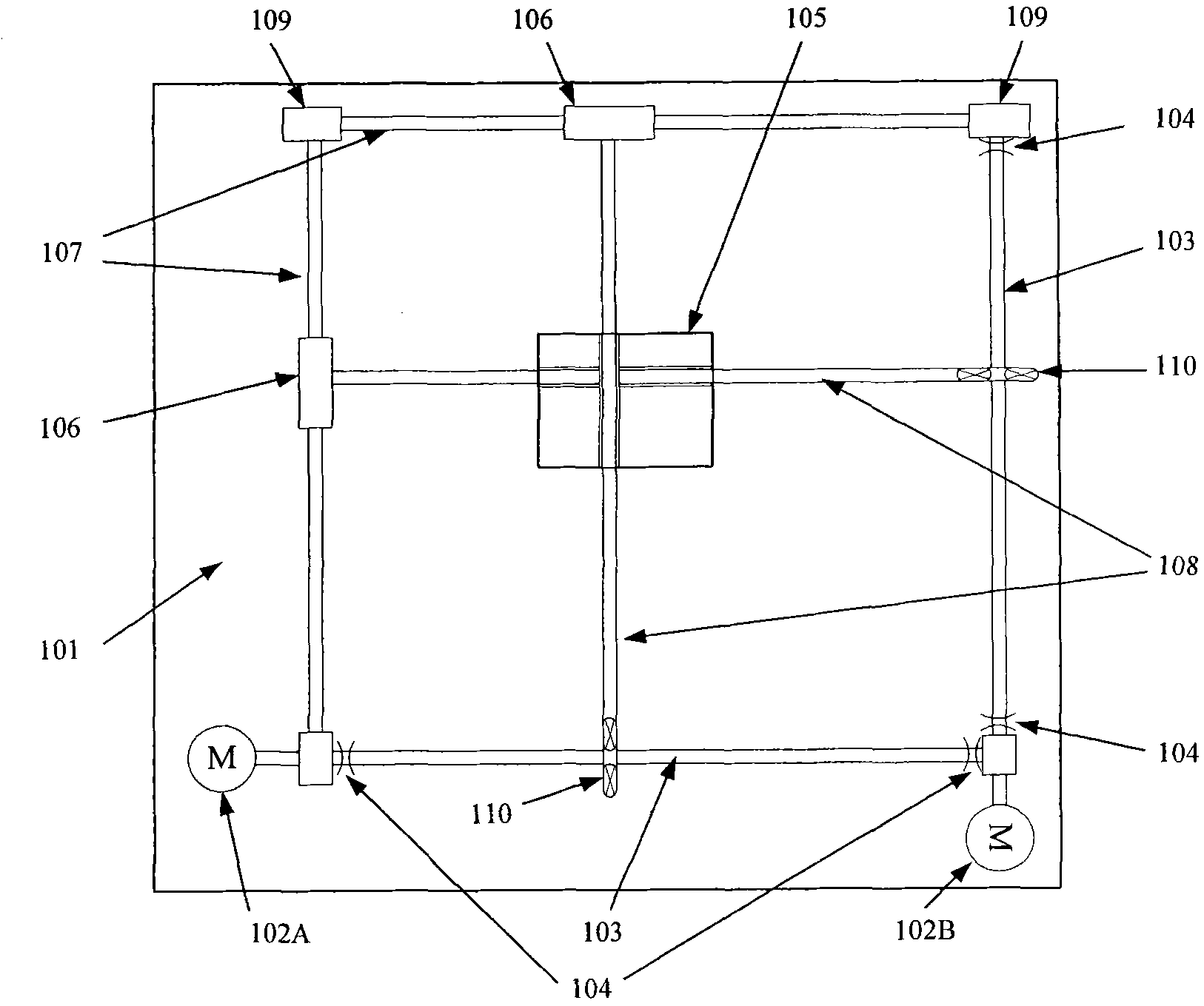
[0022] see figure 2 , the balance adjustment mechanism 1 includes a center of gravity slider 105, two drive motors 102 (comprising a horizontal drive motor 102A and a longitudinal drive motor 102B), two worms 103, two guide rails 107, two slide rods 108, four limiters A switch 104, a mechanism platform 101 and four fixing devices 109; two drive motors 102 are respectively connected with two worms 103 to drive the worms 103 to rotate; the two worms 103 are respectively driven by two worm gears 110 to drive two slide rods 108 Carry out planar movement; one end of each slide bar 108 is connected with a worm wheel 110, passes through the cente...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More