

Synergistic target tracking method for dual unmanned planes under communication constraint
A technology of target tracking and dual UAVs, which is applied in the fields of flight control, target estimation and flight control, and can solve the problems that cannot meet the constraints of communication distance and detection distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
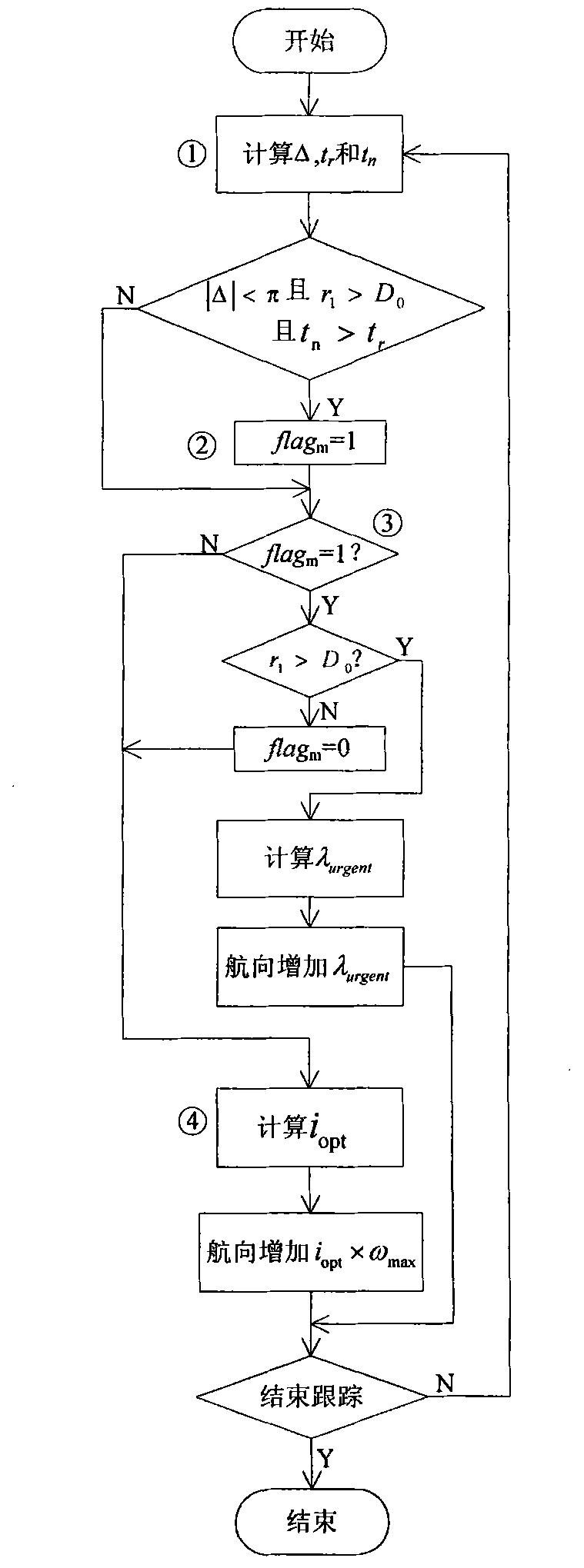
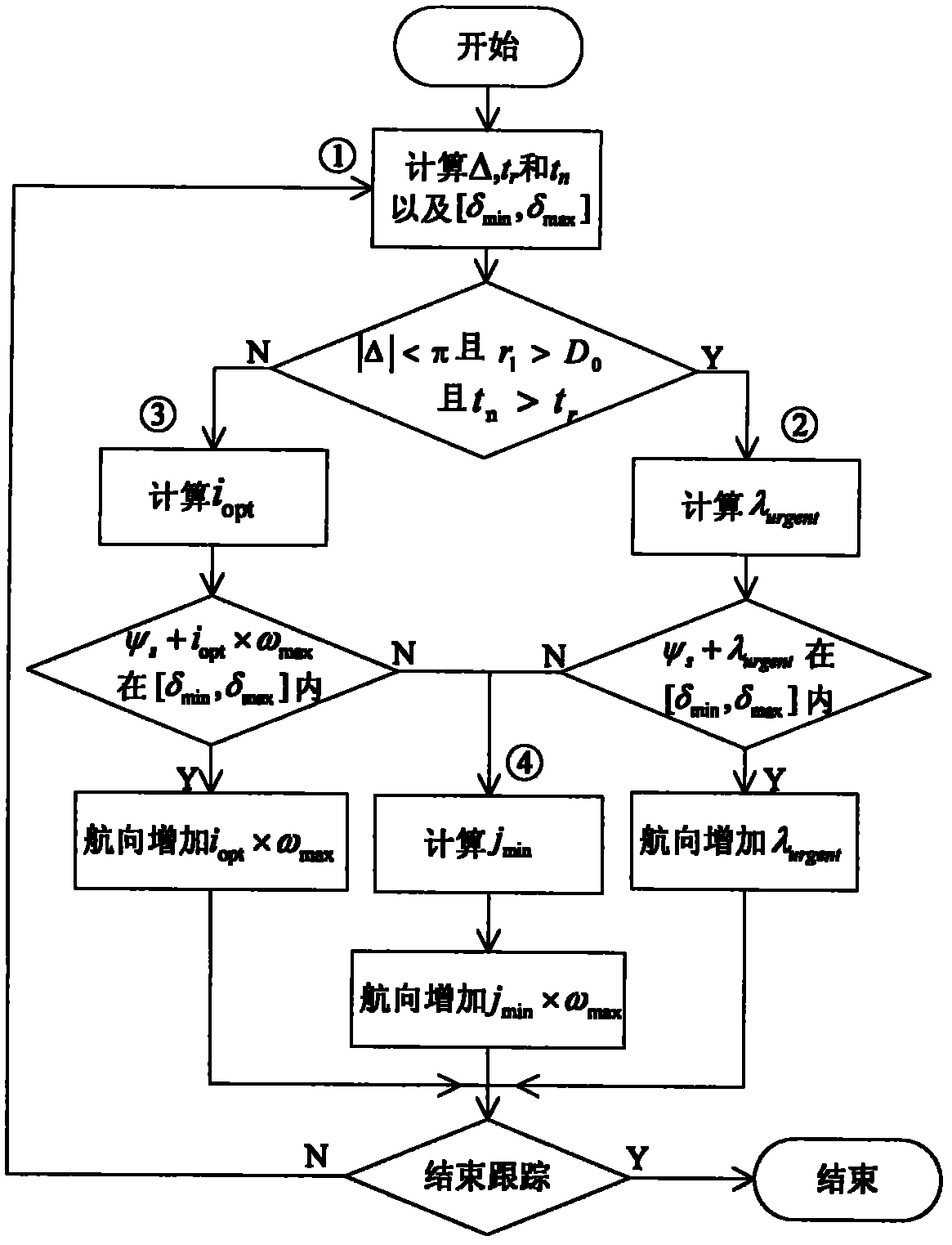
[0073] The algorithm is implemented virtually through computer simulation; in each cycle of the simulation, the lead plane is set to fly first, and the wingman is set to fly later. The implementation steps are as follows:
[0074] The simulation environment is set as follows: the target height is 0, moving eastward in a straight line at a rate of 18m / s; the flight height of the lead plane is 400m, and the flight height of the wingman is 350m; the angle error covariance matrix is P=diag(0.0175 2 , 0.0175 2 )rad 2 ;The stop condition is that the simulation time is greater than 600s; D 0 =900m; Δt=1s. See the table below for other settings.
[0075] simulation settings
[0076]
[0077] Leading machine:
[0078] M1. Calculation time of the main machine t r :
[0079] t r =(1800-r 1 )×(v - t -v - 2 ) -1
[0080] long machine computing t n :
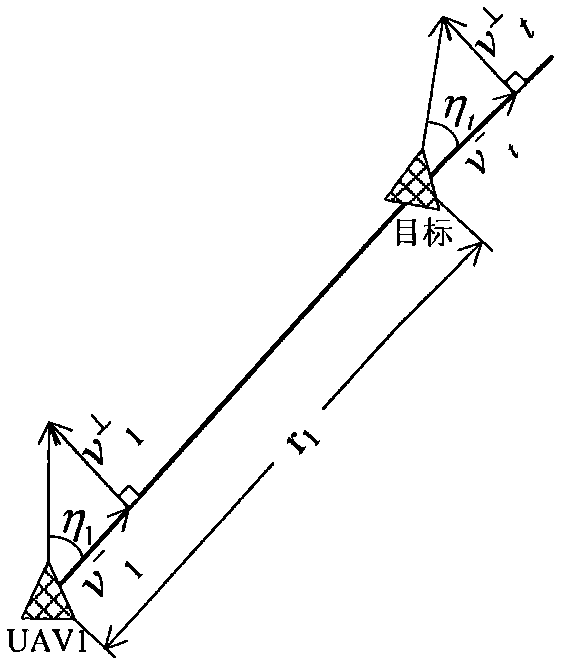
[0081] Δ=(0.5v ⊥ t -v ⊥ 1 )t r / r 1
[0082] ξ=±acos(cos(η t +Δ) / 5)+2kπ-η 1 -Δ, k=0, ±1
[0083] ξ 0 =sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More