Mixed time sequence synchronous control method in physical simulation
A semi-physical simulation, timing synchronization technology, applied in the field of simulation, to achieve the effect of flexibility and scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0016] Specific implementation mode 1. Combination Figure 1 to Figure 3 Describe this embodiment, the hybrid timing synchronization control method in hardware-in-the-loop simulation, this method is realized by the following steps:
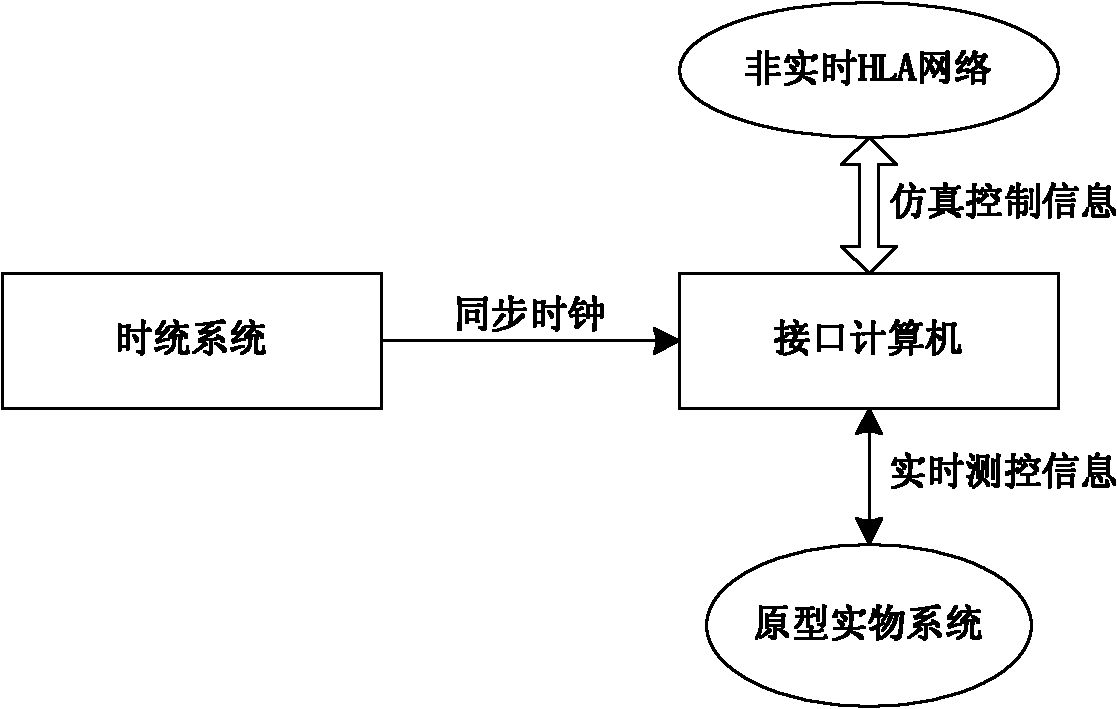
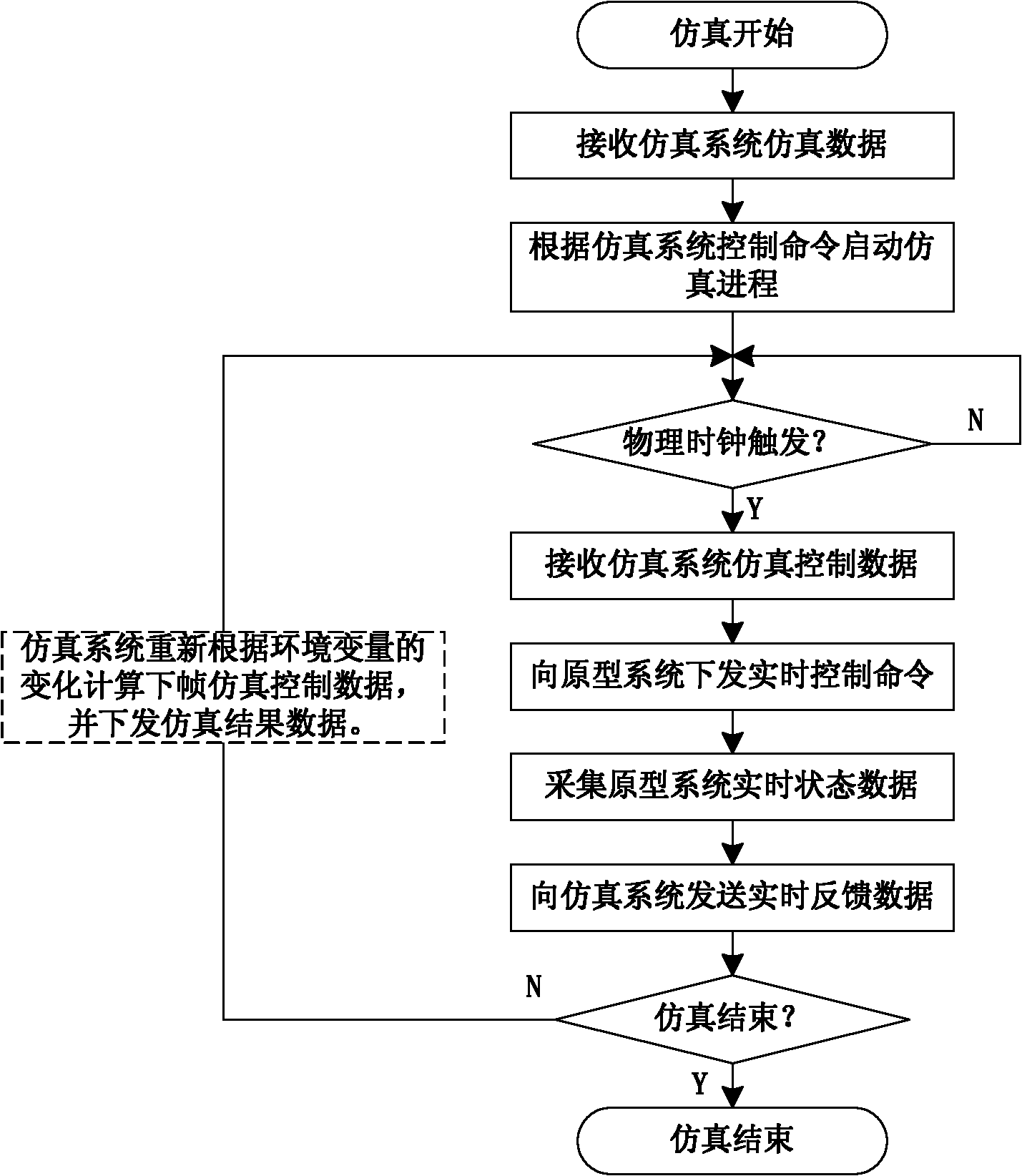
[0017] Step 1. The interface device starts the simulation process according to the simulation data received from the simulation control system, and realizes the physical interrupt response of the clock system through the serial interface interrupt mode;
[0018] Step 2, the interface device described in step 1 transmits the received simulation data to the prototype physical system, and the prototype physical system receives and obtains the simulation data;
[0019] Step 3, the interface device receives the status and data collected in real time by the prototype physical system; and transmits the status and data to the simulation control system;
[0020] Step 4: Calculate the simulation target data of the next cycle according to the data obtained ...
specific Embodiment approach 2
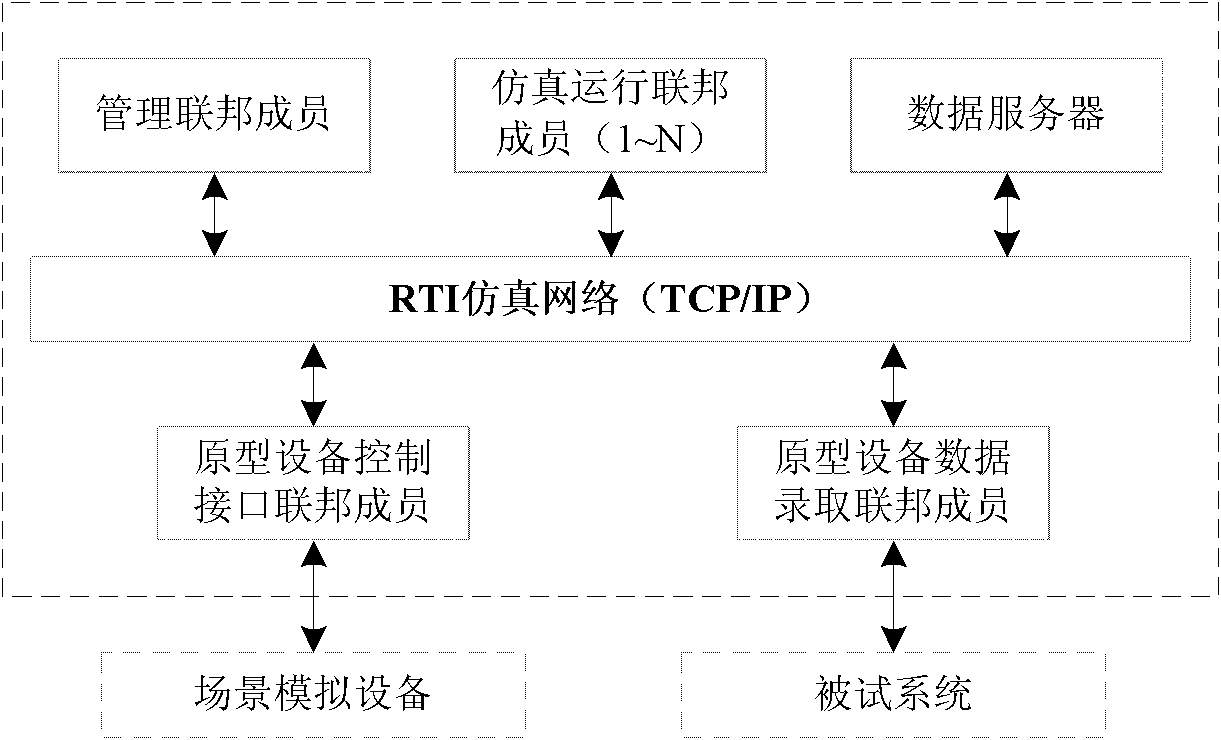
[0023] Specific embodiment two, combine Figure 4 Describe this embodiment mode, this embodiment mode is the specific simulation process of implementing the hybrid timing synchronization control method in the hardware-in-the-loop simulation described in 1:
[0024] combine figure 2 and image 3 , using hybrid timing synchronous control (MSSC) technology to realize hardware-in-the-loop simulation control, image 3 Take the 100Hz control frequency as an example: the core of MSSC is to set two sets of timing sequences in the interface member, the simulation timing and the physical timing, trigger the internal simulation timing operation through the physical timing, and then trigger the simulation through the information interaction under the control of RTI in the interface simulation timing network operation. The information exchange process is as follows:
[0025] 1. The management member starts the simulation test according to the operation instruction, and sends the simul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More