

Control system for remote-controlled robot
A control system and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problem of low scalability and achieve the effect of ensuring openness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention Modifications in equivalent forms all fall within the scope defined by the appended claims of this application.
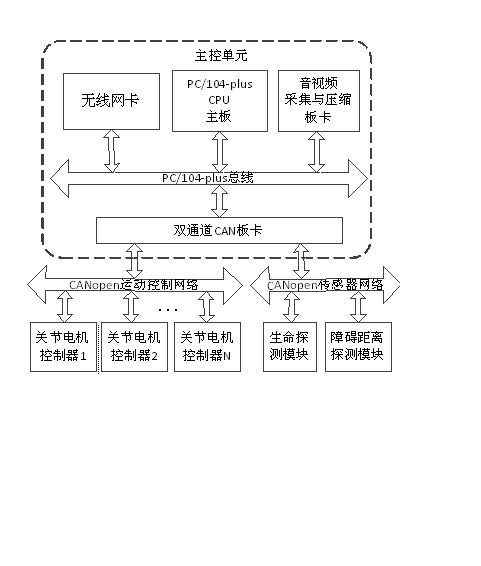
[0027] Such as figure 1 As shown, the present invention provides a remote-controlled robot control system with a multi-bus structure for controlling a remote-controlled robot with multiple joints and sensor units. The remote control robot control system includes a main control unit, a motion control network and a sensor network. The main control unit is connected to the motion control network through a CAN bus interface, and the main control unit is also connected to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More