

Autonomous operation forestry robot platform
A robot and robot body technology, applied in the direction of electrical program control, digital control, etc., can solve the problems of robots that do not complete various tasks autonomously, and achieve the effects of flexible and reliable autonomous movement, high exercise ability and intelligent degree
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
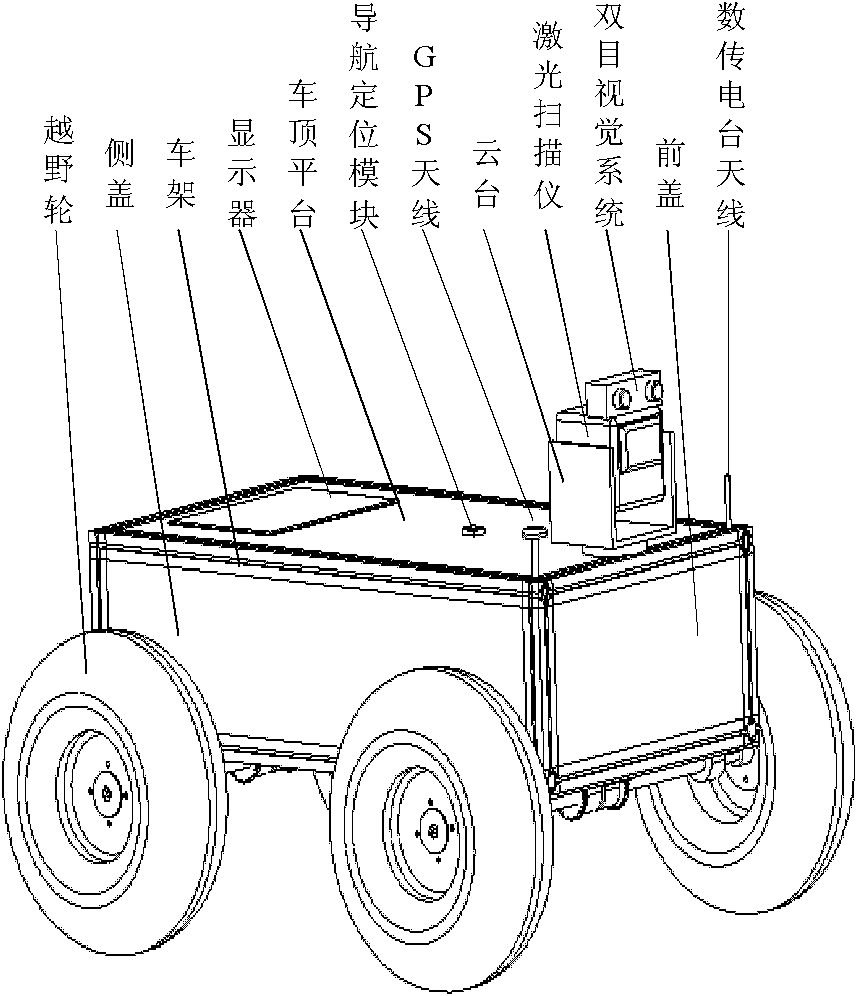
[0019] The autonomous operation forestry robot platform of the present invention, its preferred specific embodiment is as follows figure 1 , figure 2 , image 3 , Figure 4 As shown, it includes the robot body and the control system. The robot body adopts a four-wheel drive structure, including the chassis, roof platform, and frame.
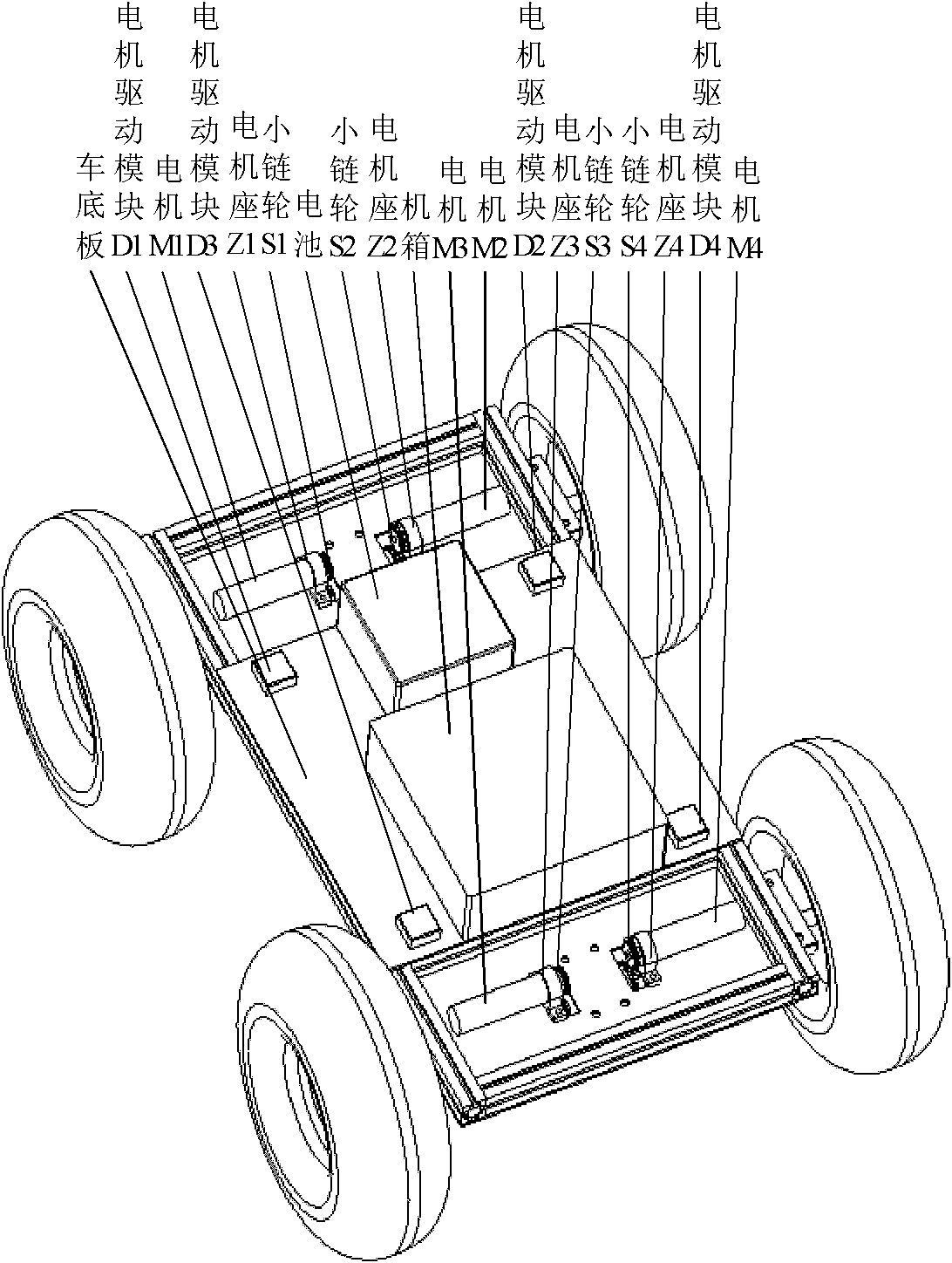
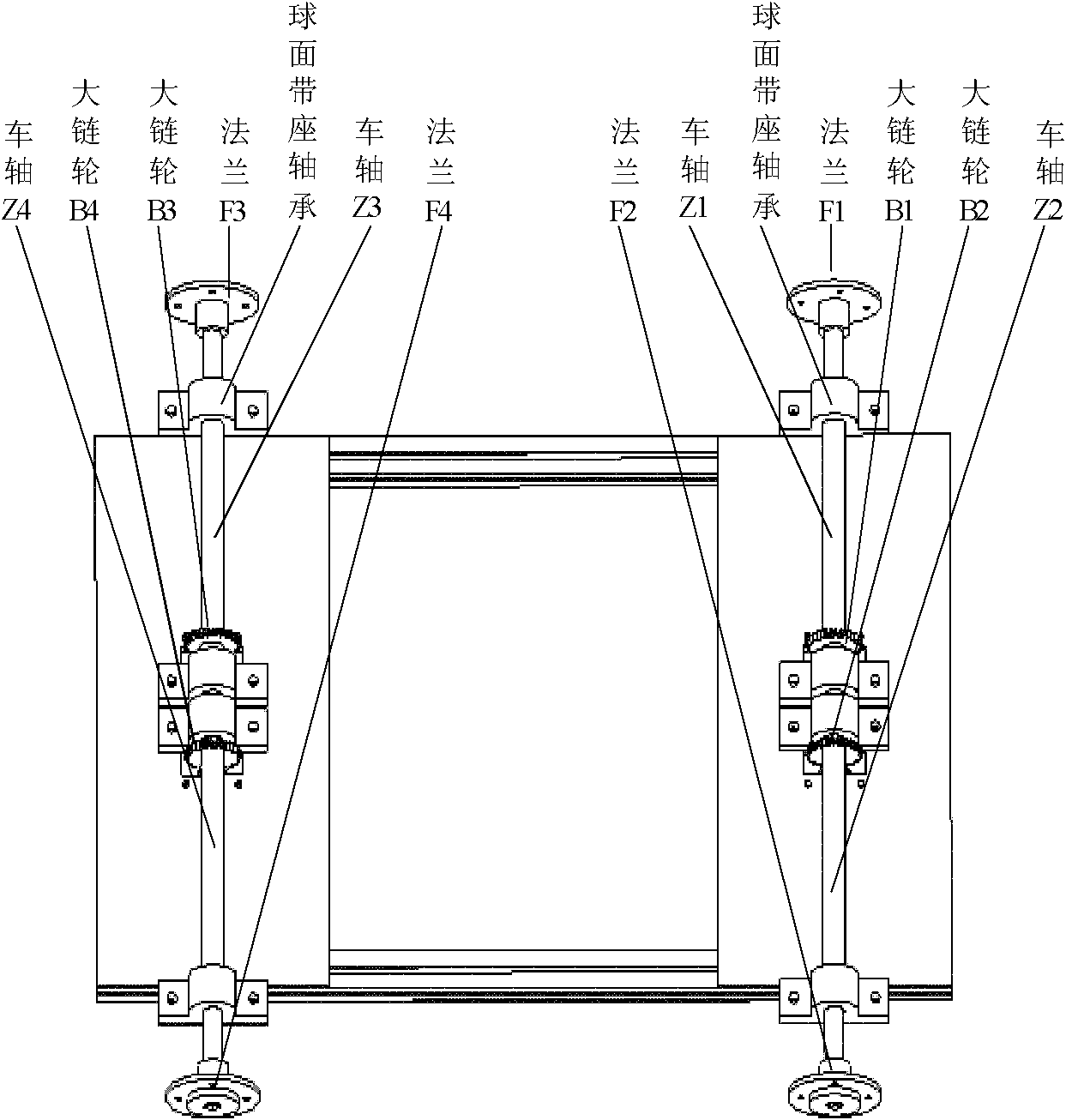
[0020] The chassis of the robot body includes the bottom plate, four DC brush reduction servo motors, four motor bases, four small sprockets, four large sprockets, four chains, four transmission shafts, and eight spherical bearings with seats , four flanges, four off-road wheels and so on. Among them, four DC brush deceleration servo motors are respectively installed on four motor bases, and the output shafts of the motors are respectively connected to small sprockets S1, S2, S3, S4, and the four small sprockets pass through four chains and four large chains respectively. Wheels B1, B2, B3, and B4 are connected, and the four large sprockets ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More