

Book shelving and unshelving robot
A robot and book technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems affecting the quality of borrowing books, improve reliability, improve management level, and reduce system costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The invention relates to a robot for loading and unloading books, including a robot arm and a controller. Details are given below.
[0028] 1 How Library Robots Work
[0029] 1.1 Basic structure of library robot:
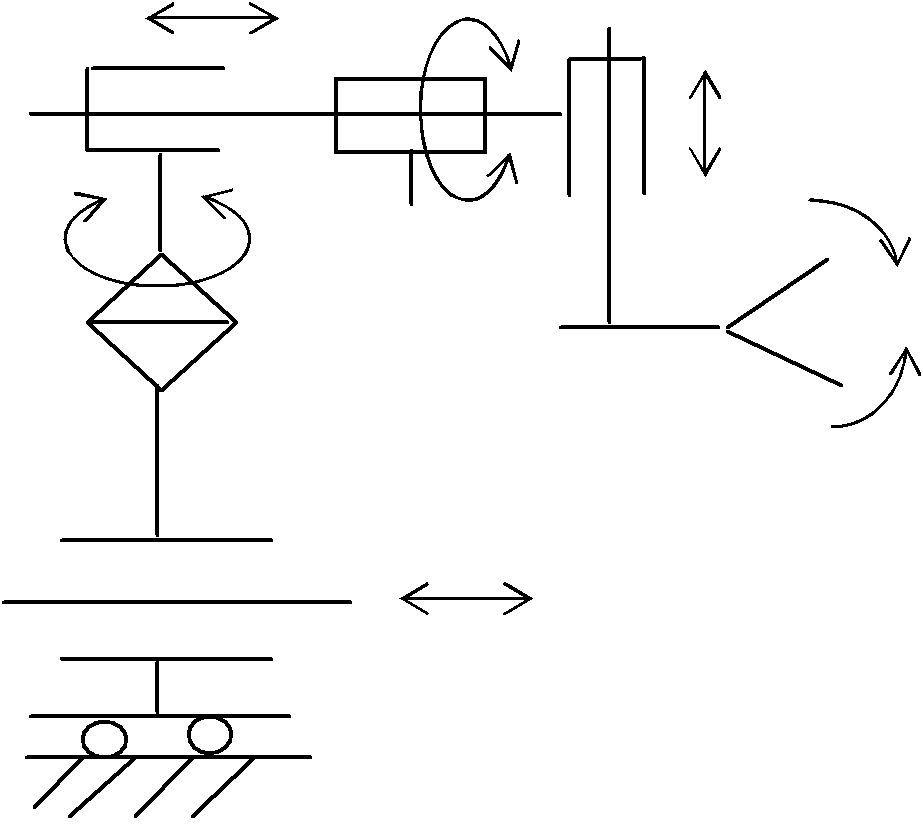
[0030] The book robot is composed of a working part for loading and unloading books and a walking part. The working area of library robot manipulator is a cuboid, such as figure 1 The main actions of the robot hand shown are rotation and linear movement, arc arrows indicate the rotating part, and straight arrows indicate linear motion. Therefore, the executive agency is selected as a compound kinematic pair composed of a rotating pair and a moving pair. The rotating pair is realized by a stepping motor, and the moving pair is realized by a single-acting or double-acting cylinder.
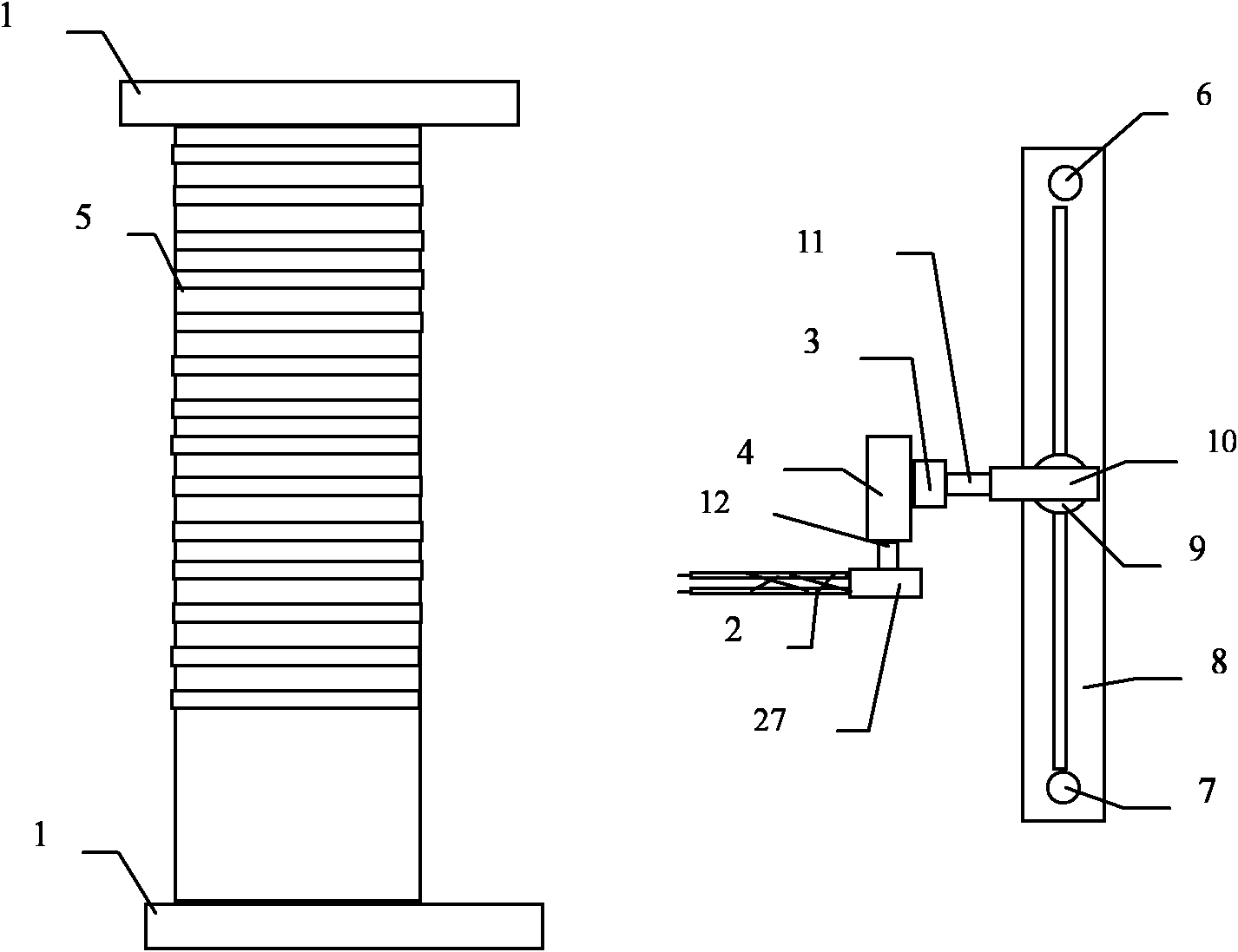
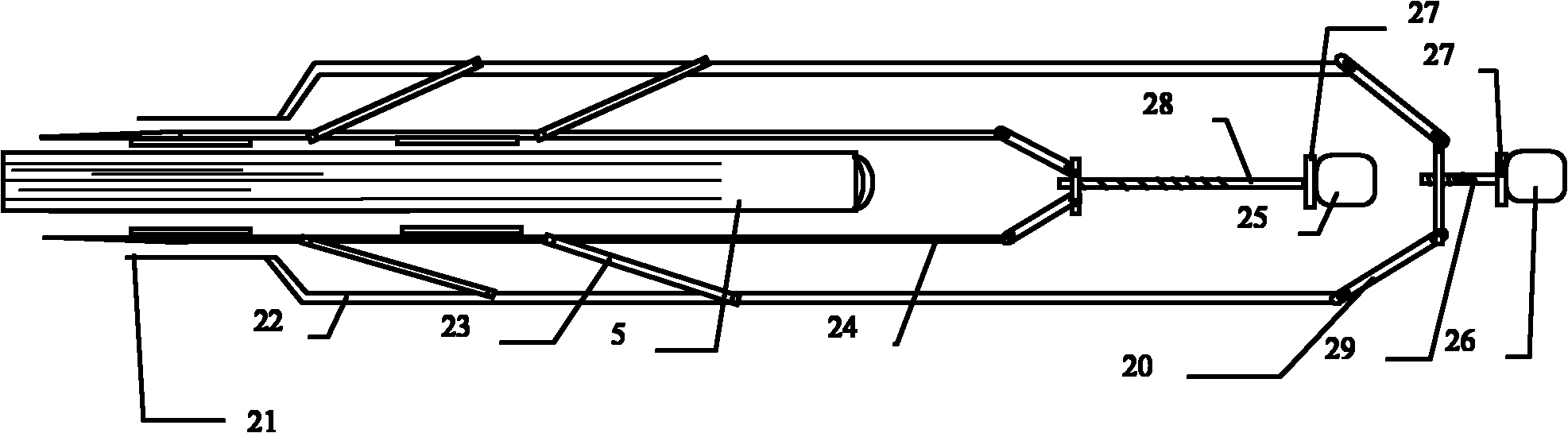
[0031] Such as figure 2 As shown, the robotic arm includes:
[0032] Boom 8 is a double-acting rodless cylinder (the bottom is equipped with running wheels) driven by a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More