

Yacht monitoring device and system
A monitoring device and yacht technology, applied in general control systems, control/regulation systems, program control, etc., can solve the problems of poor applicability and high construction cost of yacht monitoring devices, and achieve the effects of saving monitoring costs and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
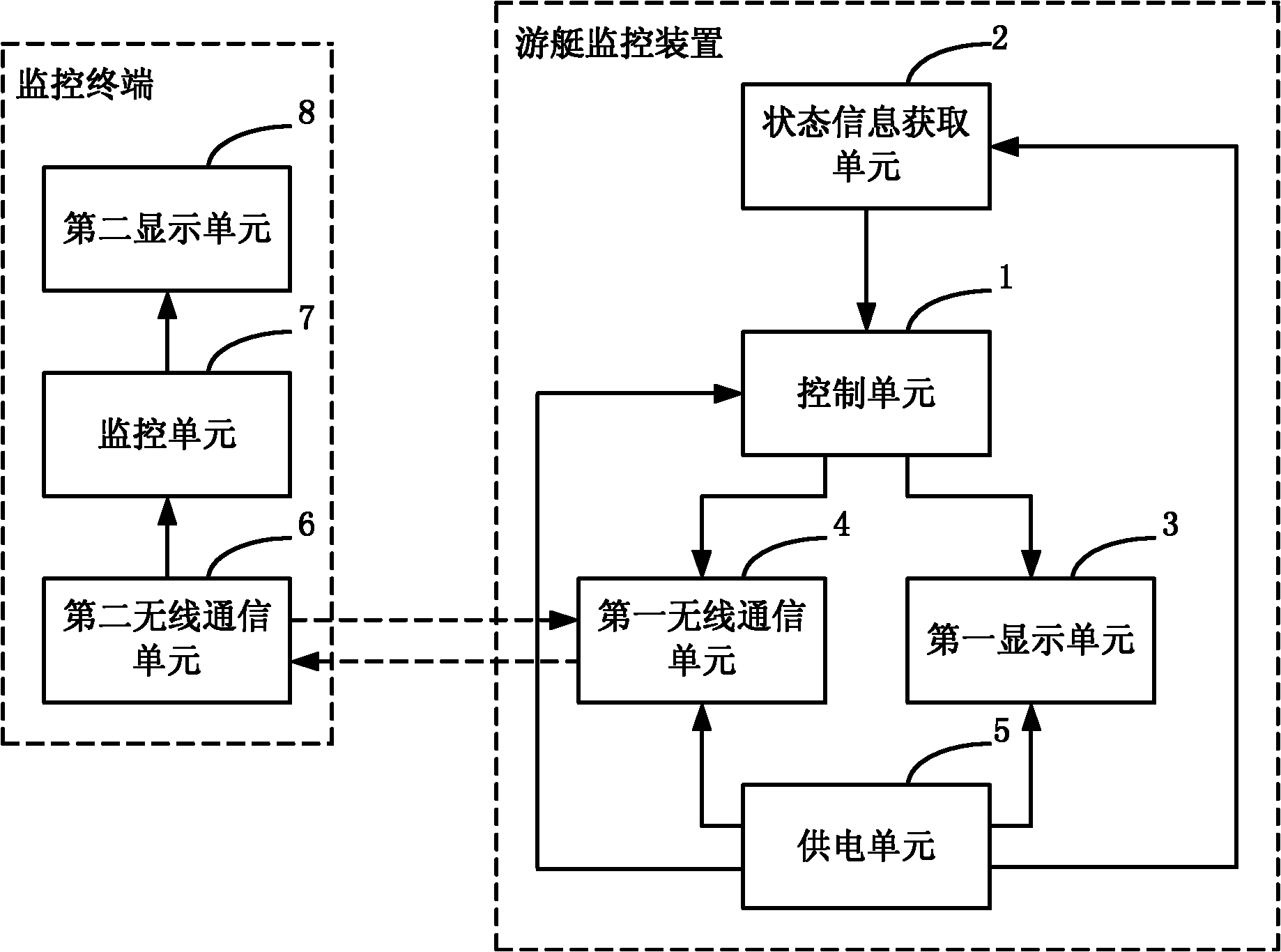
[0024] The yacht monitoring system provided by the embodiment of the present invention obtains the status result information of the yacht operation through the yacht monitoring device on the yacht, and uses the short-distance wireless communication protocol to send the status result information to the monitoring terminal placed in the main control room of the shore station for display. .
[0025] figure 1 The structural principle of the yacht monitoring system provided by the embodiment of the present invention is shown, and for the convenience of description, only the parts related to the embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More