

Autonomous astronomical navigation method of Mars probe in cruise section
A Mars probe and celestial navigation technology, applied in astronomical navigation and other directions, can solve problems such as low precision, high requirements for probe orbit design, and a small number of navigation asteroids or navigation pulsars
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
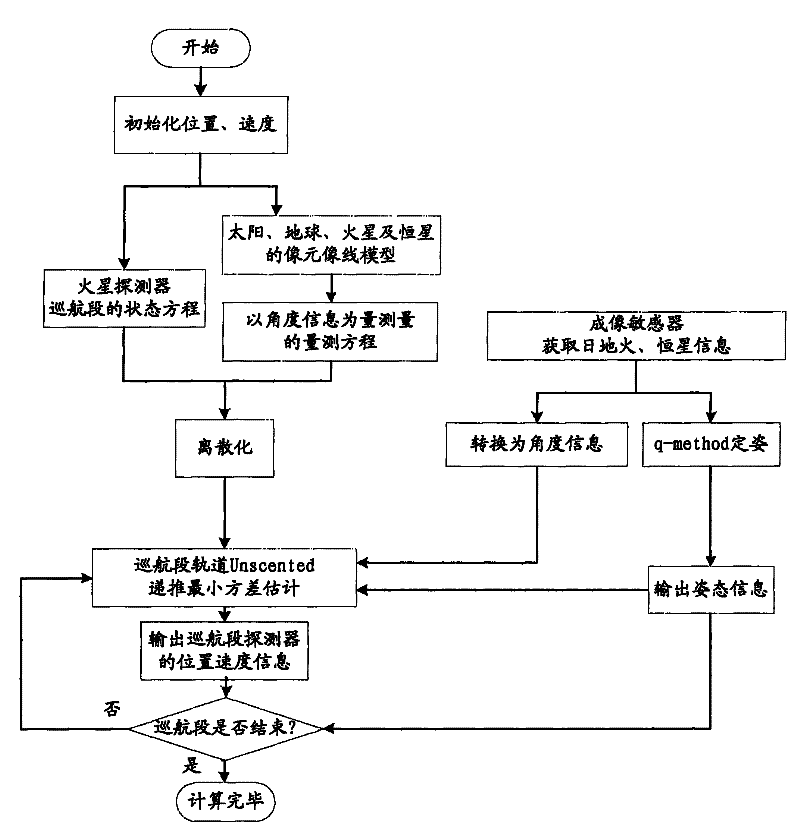
[0057] like figure 1 Shown, the concrete implementation method of the present invention is as follows:
[0058] 1. Establish the state equation of the Mars rover navigation system based on the orbital dynamics of the cruising segment;
[0059] First initialize the position and speed, set the state quantity X=[x y z v x v y v z ] T ,x,y,z,v x , v y , v z are the three-axis position and velocity of the detector in the heliocentric inertial coordinate system, respectively. According to the orbit design of the detector, the initial values of the position and velocity of the detector are selected as
[0060] X(0)=[-2.024×10 11 m-5.336×10 10 m-2.276×10 10 m-1.384×10 3 m / s-2.194×10 4 m / s-9.520×10 3 m / s] T
[0061] Considering the effects of the gravitational force at the center of the sun, the center of Mars and the center of the earth on the probe, and selecting the heliocentric ecliptic inertial coordinate system, the state model of the Mars probe can be obtained...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More