

Two-degree-of-freedom (two-DOF) spherical parallel robot bionic ankle joint with central spherical pair
A spherical pair and degree of freedom technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of low level of bionics in form and function, incomplete limb functions, reduced driving ability, etc., to improve limb coordination and posture transformation capabilities , Improving the driving ability of the limbs and the effect of improving the stability of the movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
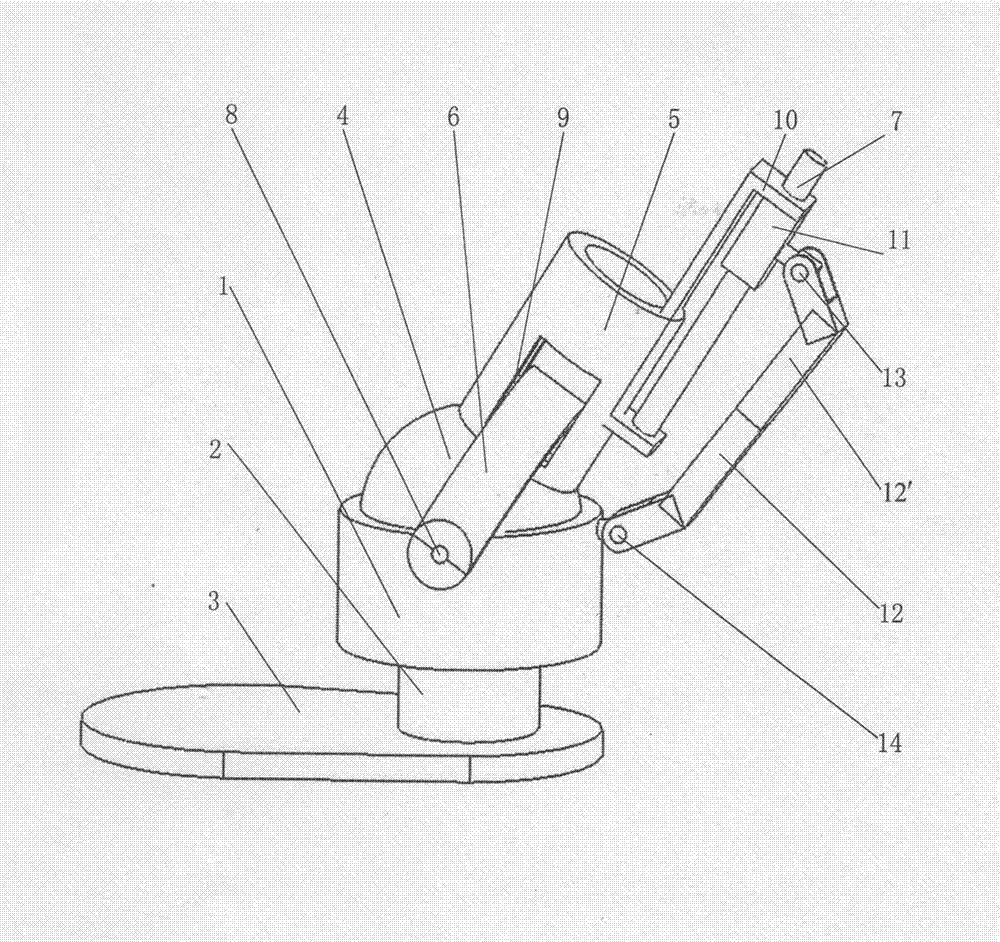
[0012] exist figure 1 In the three-dimensional schematic diagram of the bionic ankle joint with two degrees of freedom spherical parallel connection with a central spherical pair, the supporting hemispherical socket 1 is a revolving body with a concave spherical surface and the center of the ball is on the axis of rotation. perpendicular to the axis of rotation. The lower end surface of the supporting hemispherical socket is fixedly connected with the upper end of the cylindrical straight output rod 2, the axis of the straight output rod passes through the center of the supporting hemispherical socket and coincides with the rotation axis of the supporting hemispherical socket, and the lower end of the straight output rod is fixed to the upper end surface of the foot plate 3. couplet. A ball head 4 is provided in the concave spherical surface supporting the hemispherical socket, and the centers of the two overlap to form a spherical pair. The upper part of the ball head is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More