

Real-time panoramic image stitching method of aerial videos shot by unmanned plane
A panorama and UAV technology, which is applied in the field of video image panorama stitching, can solve the problems of inability to realize stitching while UAVs are flying, unable to process image sequences, and low time efficiency, so as to overcome accumulated errors and transfer Error, extended range, high efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
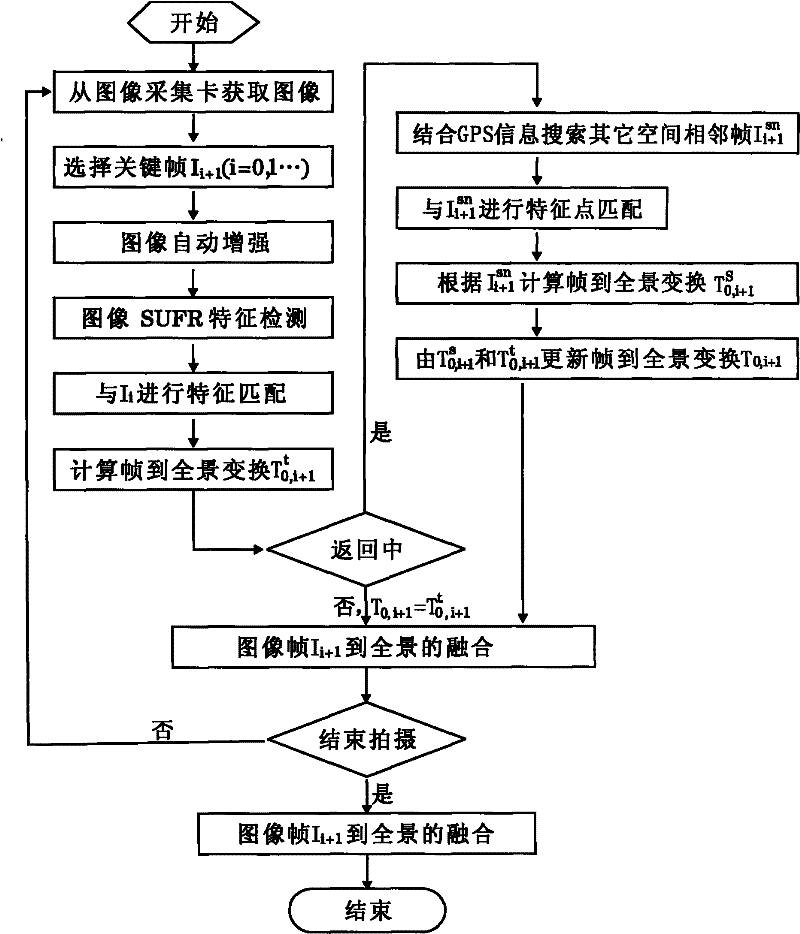
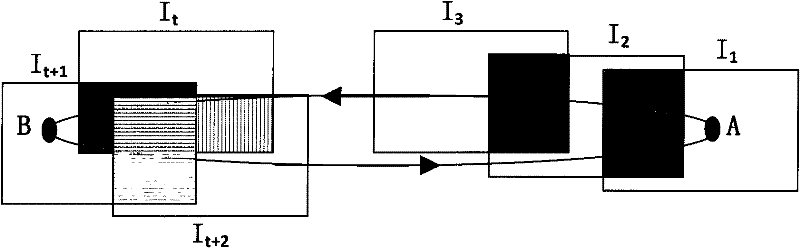
[0041] The present invention relates to the splicing of large field of view panoramas of videos taken during the flight of a UAV equipped with a camera. In particular, it relates to a method and device for splicing real-time panoramas of aerial videos taken by a UAV. The present invention has many outstanding features and overcomes the The insurmountable drawbacks of the existing video image stitching methods can make the large-field panorama stitching technology for shooting videos reach a new level. The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and through specific implementation methods.
[0042] In order to perform splicing according to the present invention, the main equipment in this embodiment includes: unmanned aircraft, unmanned aerial vehicle remote control device, high-resolution camera carried by unmanned aerial vehicles, a computer, microwave video transmission system, and vi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More