Method for fusing ocean current observation data of unmanned undersea vehicle (UUV)
A technology of observation data and fusion method, which is applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of small observation range, influence of sea surface environment, and no data fusion of ocean current profile data, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
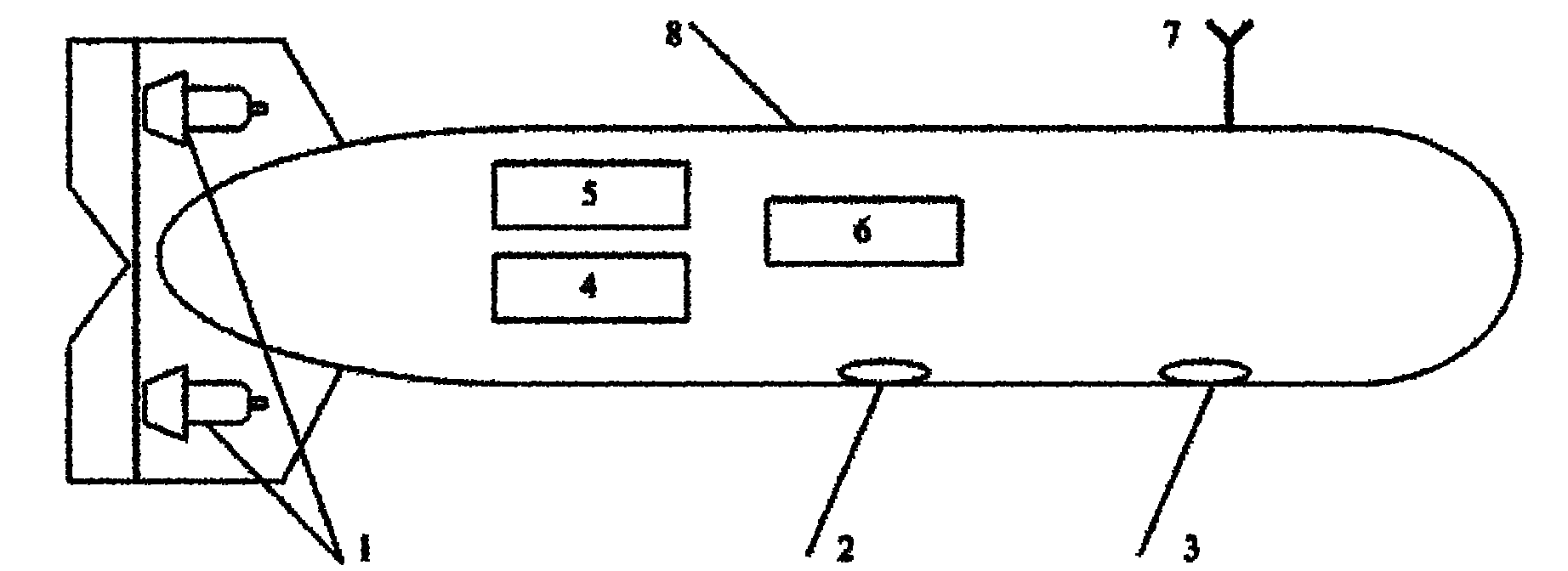
[0029] attached figure 2 It is a schematic diagram of the composition of the UUV system of the present invention, 1 is the thruster, 2 is DVL, 3 is ADCP, 4 is the attitude sensor, 5 is the compass, 6 is the control computer, 7 is GPS, 8 is the UUV shell.
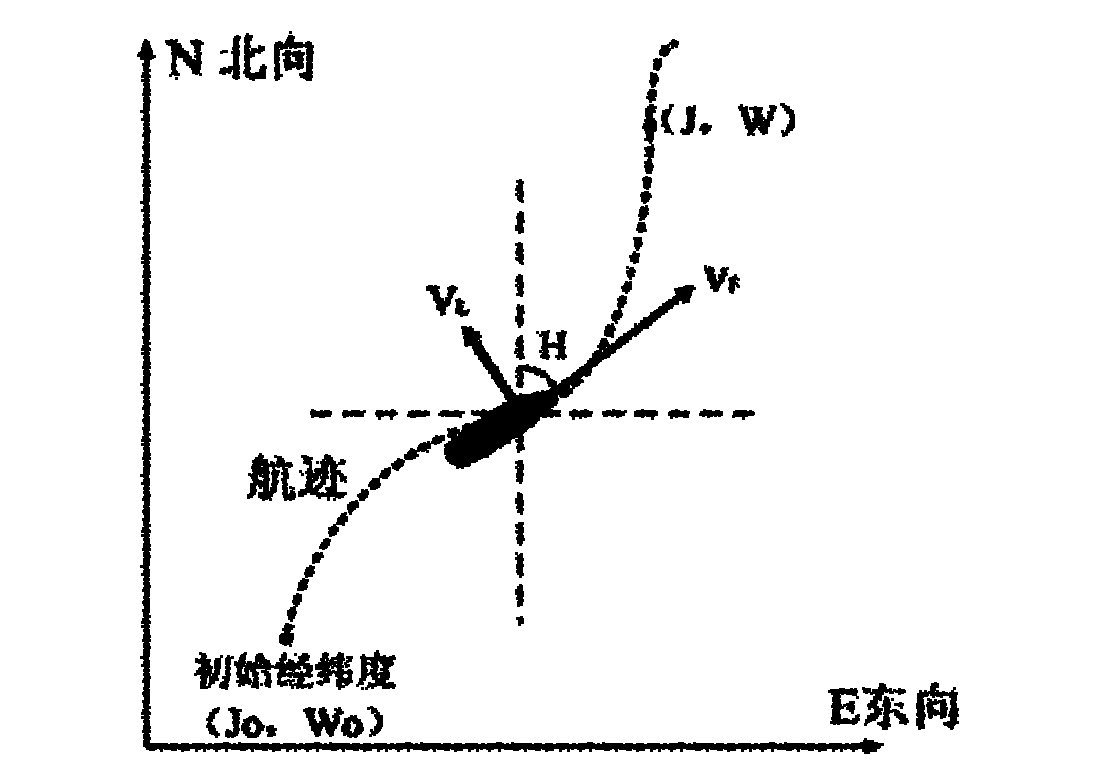
[0030] image 3 is a schematic diagram of the UUV position calculation principle in the present invention, where the initial latitude and longitude (J 0 , W 0 ) refers to the GPS longitude and latitude recorded at the initial moment when the position is estimated, and (J, W) is the position of the UUV at any time when the UUV position is estimated.
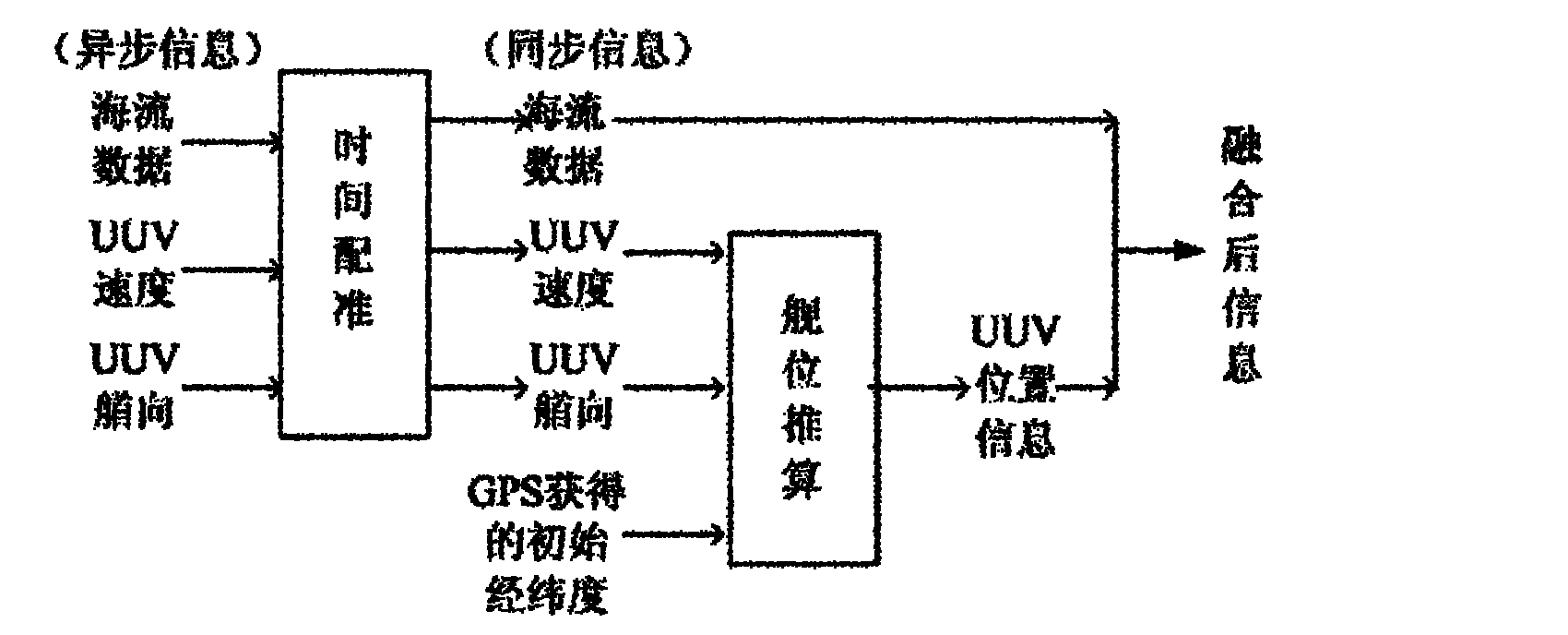
[0031] 1. Ocean current profile data acquisition
[0032] By designing a UUV (such as figure 1 shown) to obtain the current profile information in the observed sea area. The UUV mainly consists of a shell, propeller, DVL, ADCP, attitude sensor, compass, GPS and con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More