

Multi-agent system cooperative control method capable of maintaining connectivity
A multi-agent system, collaborative control technology, applied in the field of intelligent robots, can solve problems such as inability to maintain connectivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
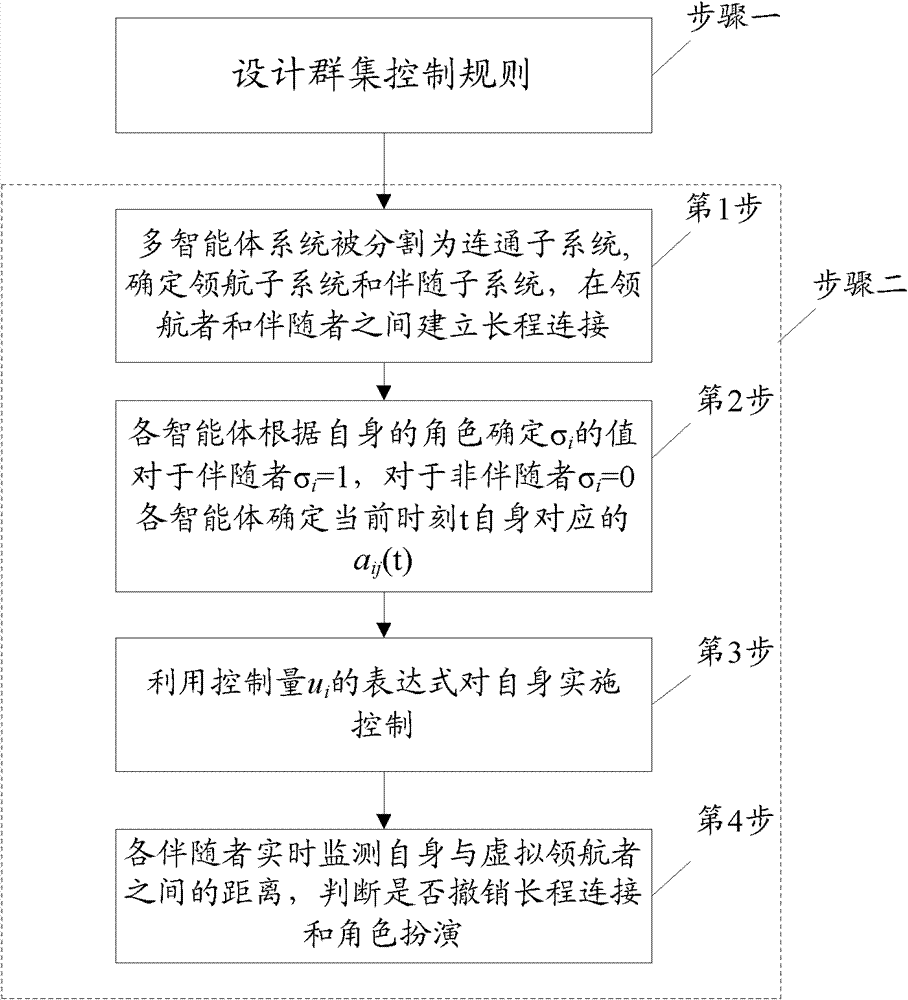
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0039] Stable swarm movement means that all agents asymptotically reach the same speed, the agents avoid collisions with each other, and the compact structure of the final system can minimize the potential energy of all agents. At this time, the system is called a stable swarm.
[0040] Consider a multi-agent system with N agents moving in n-dimensional Euclidean space, and the agent with double-integral dynamics has particle dynamics. A double-integral continuous-time model of the system is described as follows:
[0041] x · i = v i ( 1 )
[0042] m v · i = u i i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More