

Symmetrical bionic hexapod walking device
A walking device, symmetrical technology, applied in the field of machinery, can solve problems such as poor passability in non-structural environments, and achieve the effects of good adaptability, simple structure and simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
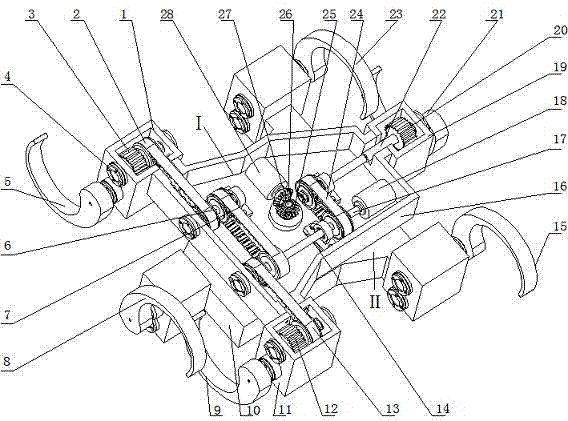
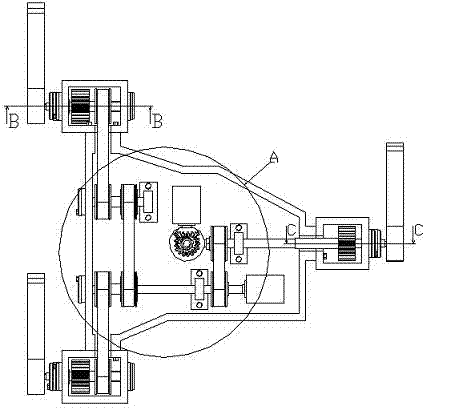
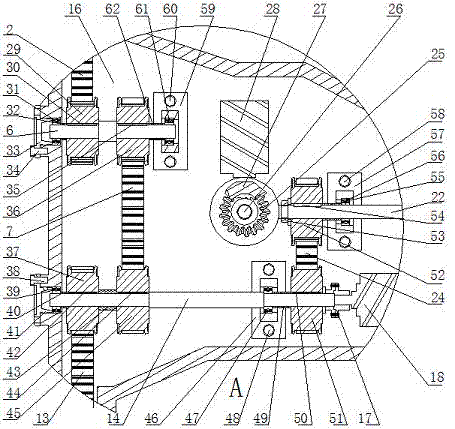
[0047] see figure 1 , the symmetrical bionic hexapod walking device of the present invention comprises two upper mechanism I and lower mechanism II with the same structure and center symmetry, the upper mechanism I is connected with the lower mechanism II through the central steering unit, and the steering unit includes a cone Gear I 25, steering shaft 26, bevel gear II 27 and motor 28, this motor 28 is connected with steering shaft 26 by the bevel gear pair that is formed by bevel gear I 25 and bevel gear II 27, drives steering shaft 26 to rotate and realizes turning; In the upper mechanism I, the support unit is composed of the upper frame housing 16 and the C-shaped leg support block I 1, the C-shaped leg support block II 11, and the C-shaped leg support block III 19; wherein, the precision motor 18 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More