

Bayesian path planning device and method based on GPS detection
A path planning and Bayesian classifier technology, applied to road network navigators and other directions, can solve the problems of incorporating prior inference methods and the inability to avoid the randomness of real-time traffic information, and achieve good practicability and flexible integration effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation of this device is as follows:
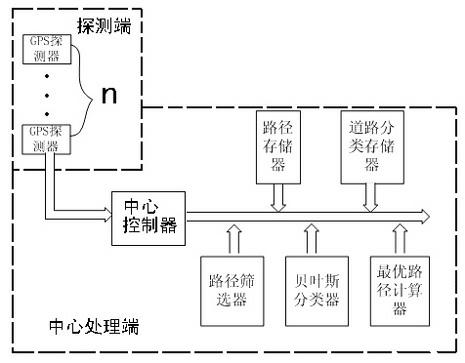
[0035] Implementation on the probing side:
[0036] Use GPS detectors to obtain travel experience data. Select n drivers who are very familiar with the regional road network that needs to be analyzed, install GPS detectors on the cars of these n drivers, and use GPS to record their daily travel data, including
[0037] Including the starting point and the ending point of its travel route. After cumulatively recording their travel paths for a period of time (such as one month), according to the GPS detectors and records on the vehicles of these drivers who are familiar with real-time roads, the travel GPS trajectory data of n experienced drivers can be obtained.
[0038] Implementation steps of the central processing terminal:
[0039] The data transmission among the modules of the whole central processing terminal is controlled by the central controller, and the operation steps are also controlled by the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More