Rotary foot type amphibious mine disaster search and rescue robot
A technology for robots and mine disasters, applied in the field of amphibious robots, can solve the problems of lack of amphibious functions and the lack of practicality of robots, and achieve the effect of small size, high efficiency and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
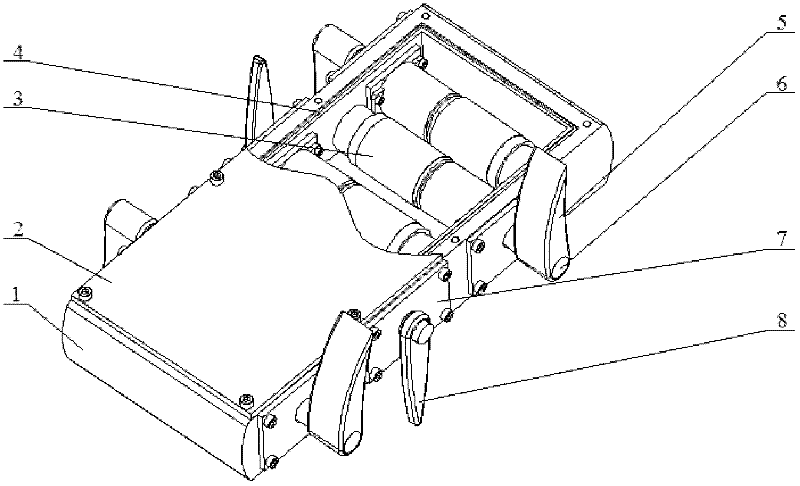
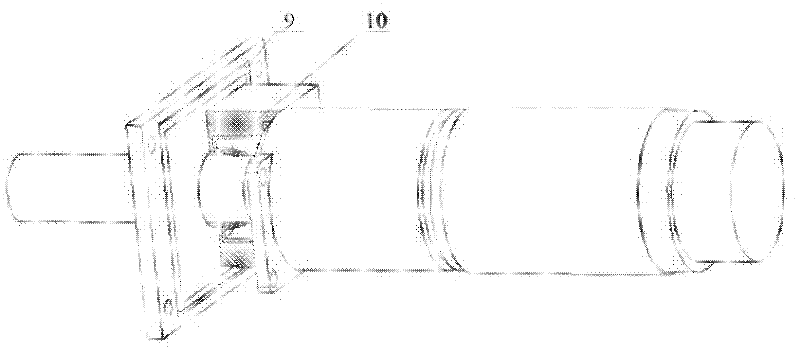
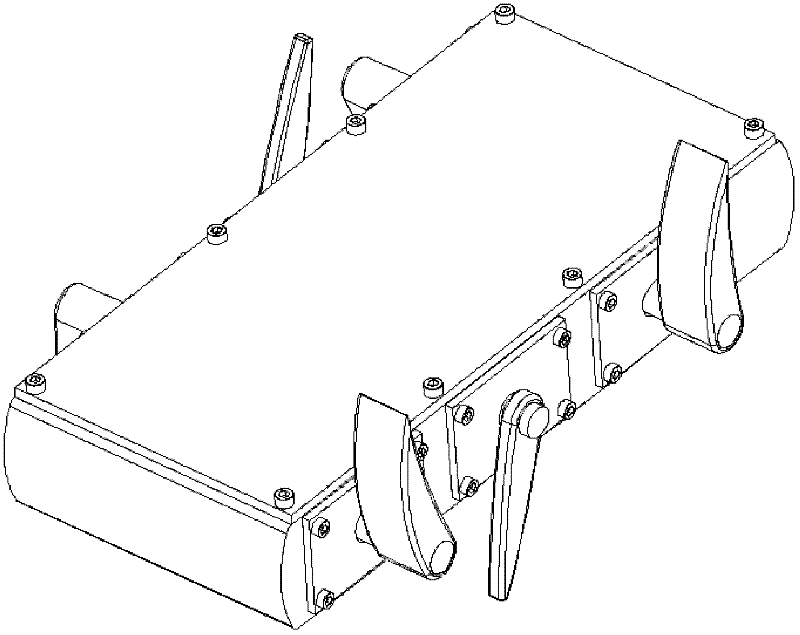
[0021] to combine Figure 1~3 , this embodiment includes the robot’s airtight housing 1, sealing strip 4, sealing strip 9, housing upper cover 2, four curved waterway dual-purpose legs 5, two supporting legs 8, oil seal cavity 7, and oil seal ring 10 , coupling 6, servo drive motor 3, etc.
[0022] The side of the robot housing 1 is asymmetrically processed with six square holes. The square holes intersect with each other and cooperate with the oil seal chamber 7. The oil seal chamber 7 passes through the holes and is fixed on the housing 1. In addition to installing the oil seal ring 10 to play the role of dynamic sealing, the oil seal cavity 7 also serves as the motor fixing seat of the servo drive motor 3, and the servo drive motor 3 is fixed by four bolts, and the output shaft of the controllable servo drive motor 3 is fixedly connected with a coupling. Shaft 6, the legs 5 and 8 of the robot are fixed on the coupling 6 by bolts, the robot casing 1 and the casing upper cov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More