

Step edge detection method oriented to humanoid robot
A technology of humanoid robot and edge detection, applied in instruments, image data processing, computing, etc., to achieve the effect of increasing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
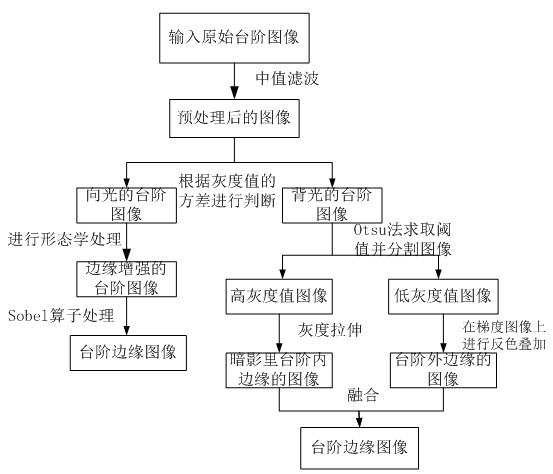
[0027] A step edge detection method for humanoid robots, comprising the following steps:
[0028] Step 1: Preprocessing the step grayscale image to be detected, the preprocessing uses median filtering to remove the noise in the image, and at the same time preserves the edge information in the image, the preprocessing uses separable binary median filtering to Process images.
[0029] Step 2: Judging the preprocessed image, if the step grayscale image is facing the light, go to step 3, if the step grayscale image is facing away from the light, go to step 5; for the preprocessed image The method of judgment is based on the variance and probability statistics of the gray value of the pixel in the image. First, calculate the variance of the gray value of the pixel in the image. When the variance is greater than 604-608, it is judged to be a backlight step , otherwise it is phototropic and photometric steps. This step is a key step of the present invention, and the methods for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More