

Control method of MEMS (micro-electromechanical system) micro-gyroscope based on direct self-adaptive fuzzy control
An adaptive fuzzy, micro-gyroscope technology, applied in the field of control systems, can solve problems that have not yet been applied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Specific embodiments of the present invention will be further described in detail below.
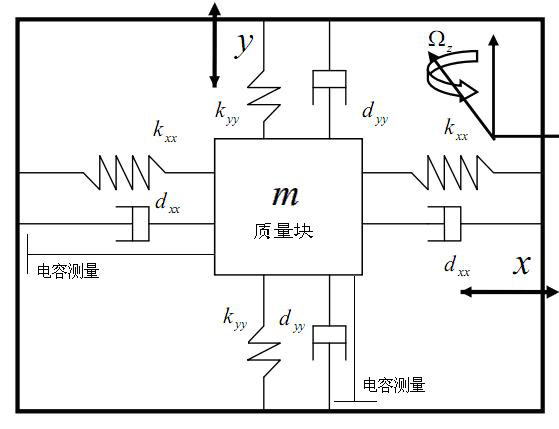
[0040] 1. MEMS micro gyroscope dynamic equation
[0041] MEMS micro-vibration gyroscopes generally consist of three components: mass blocks supported by elastic materials, electrostatic drive devices and sensing devices. The main function of the electrostatic drive circuit is to drive and maintain the constant amplitude of the vibration of the micro-vibration gyroscope; the sensing circuit is used to sense the position and speed of the mass. The micro gyroscope can be simplified as a damped vibration system composed of a mass block and a spring. figure 1 A simplified model of the microvibration gyroscope in Cartesian coordinates is shown. For MEMS micro gyroscopes, it can be considered that the mass block is limited to move only in the x-y plane, but not along the Z axis. In fact, due to the existence of manufacturing defects and machining errors, additional dynamic coupling of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More