

Method and device for positioning mobile robot and recording running track of mobile robot
A mobile robot, driving trajectory technology, applied in measurement devices, optical devices, instruments, etc., can solve problems such as difficult movement trajectory positioning, and achieve the effect of good strategy, simple structure and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
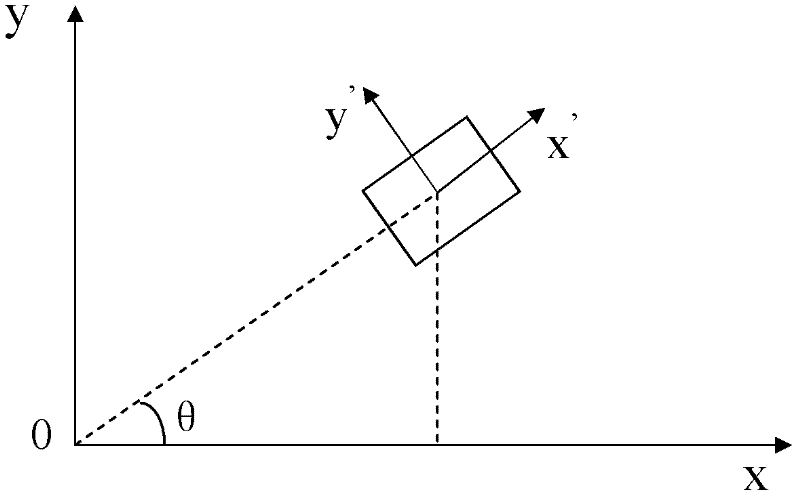
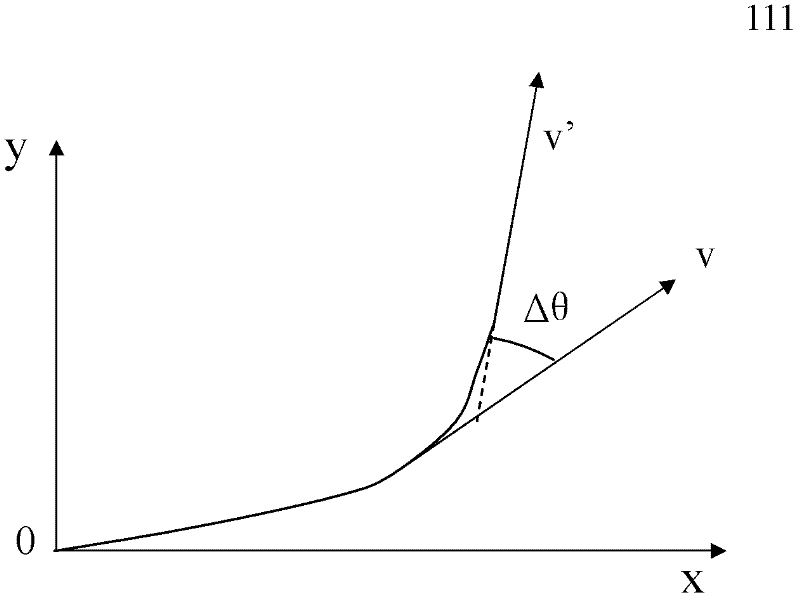
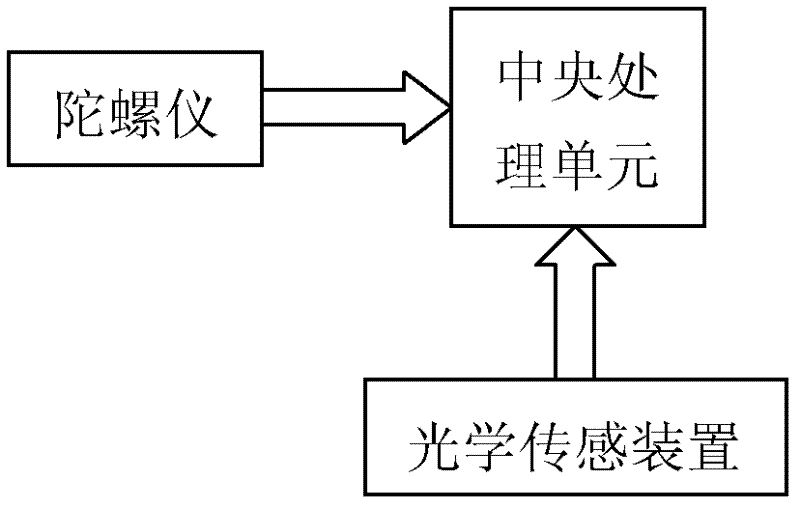
[0025] As shown in the figure, the mobile robot travel trajectory positioning device includes a central processing unit, a gyroscope for measuring the rotation angle of the robot, and a sensor for measuring the horizontal and vertical displacement of the robot; the transmission port of the gyroscope and the sensor Connect to the transmission port of the central processing unit respectively.
[0026] The sensor of the present invention adopts an optical sensing device or a photoelectric encoding device.
[0027] The optical sensing device of the present invention includes an optical imaging engine; it is mainly composed of a CMOS image sensor and an optical positioning DSP module; the CMOS image sensor is responsible for collecting images at the bottom of the robot and synchronizing them into a binary digital image matrix; The optical positioning DSP module is responsible for the analysis and comparison of adjacent image matrices, so as to calculate the horizontal and vertical ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More