

Automatic targeting and variable atomizing flow control system for weeding robot
A technology of spray flow and control system, which is applied to the device, application, and animal husbandry of catching or killing insects. It can solve the problems of difficult field weed positioning and the inability to guarantee the effect, so as to enhance operability and ensure effect of effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and processes are provided, but the protection scope of the present invention is not limited to the following implementations example.
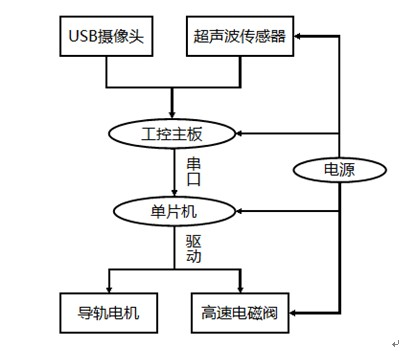
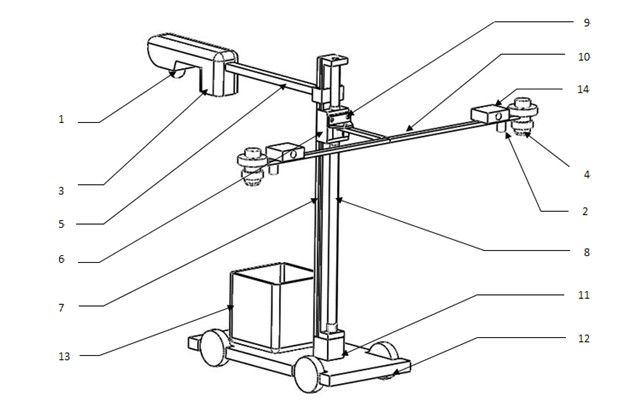
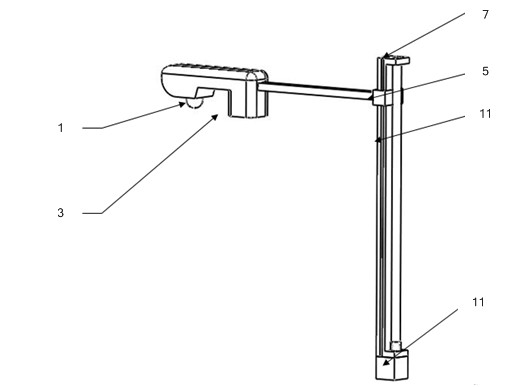
[0023] Such as figure 2 As shown, the weeding robot automatic target variable spray flow control system provided in this embodiment includes: a main control system, an adjustable variable spray system, a support system and an ultrasonic sensor 2, and the main control system and the adjustable variable spray system are respectively fixed and installed. On the bracket system, the ultrasonic sensor 2 is installed on the variable-volume spray system, and the main control system and the variable-volume spray system are connected through a data transmission interface.
[0024] Such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More