Novel four-degree-of-freedom parallel manipulator
A degree of freedom, manipulator technology, applied in the field of robotics, can solve problems affecting the fast-forward capability and dynamic performance of the mechanism, and the weight of the end effector is large, and achieve high positioning accuracy and repeatable positioning accuracy, good dynamic performance, and stiffness/mass ratio. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
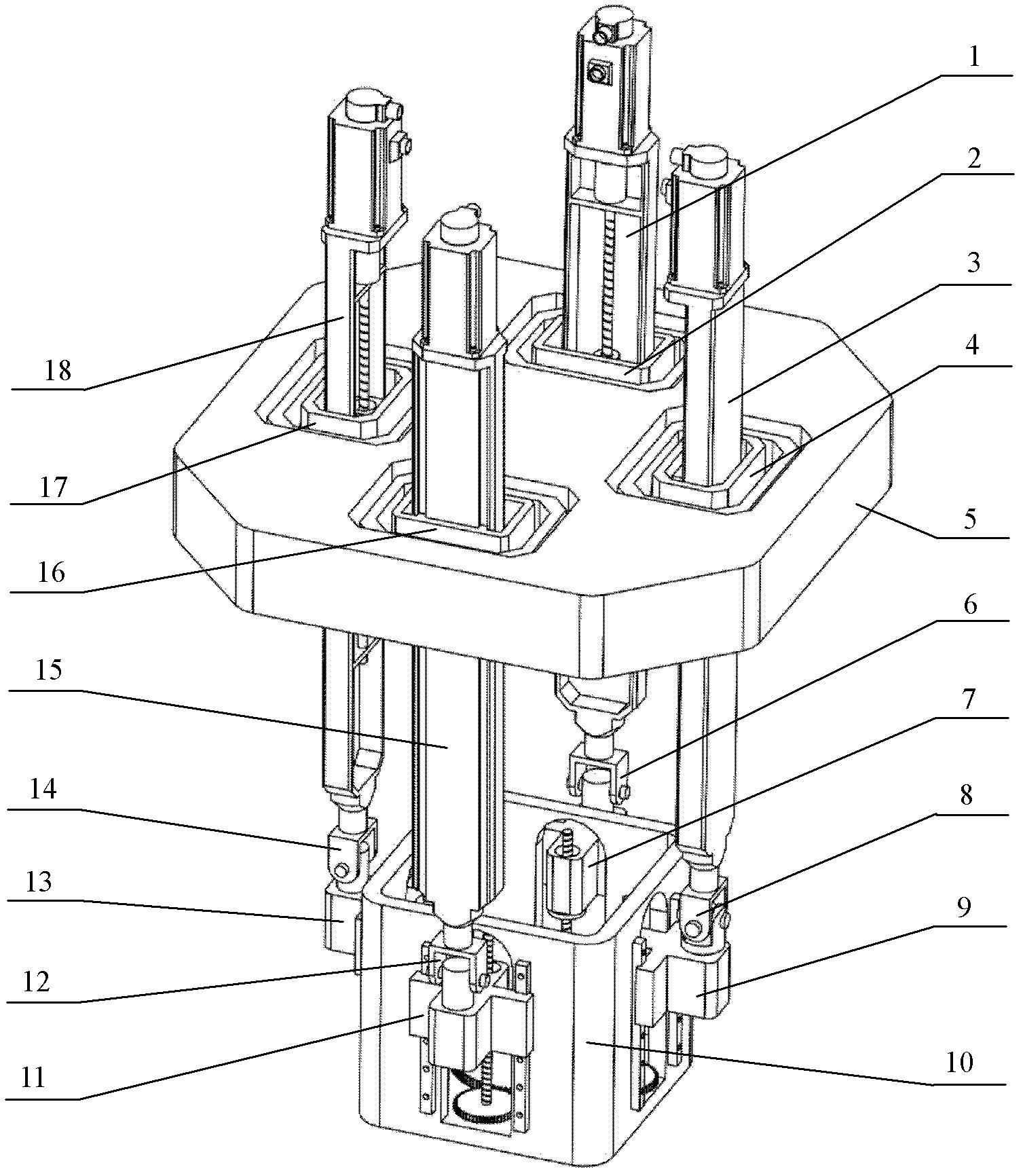
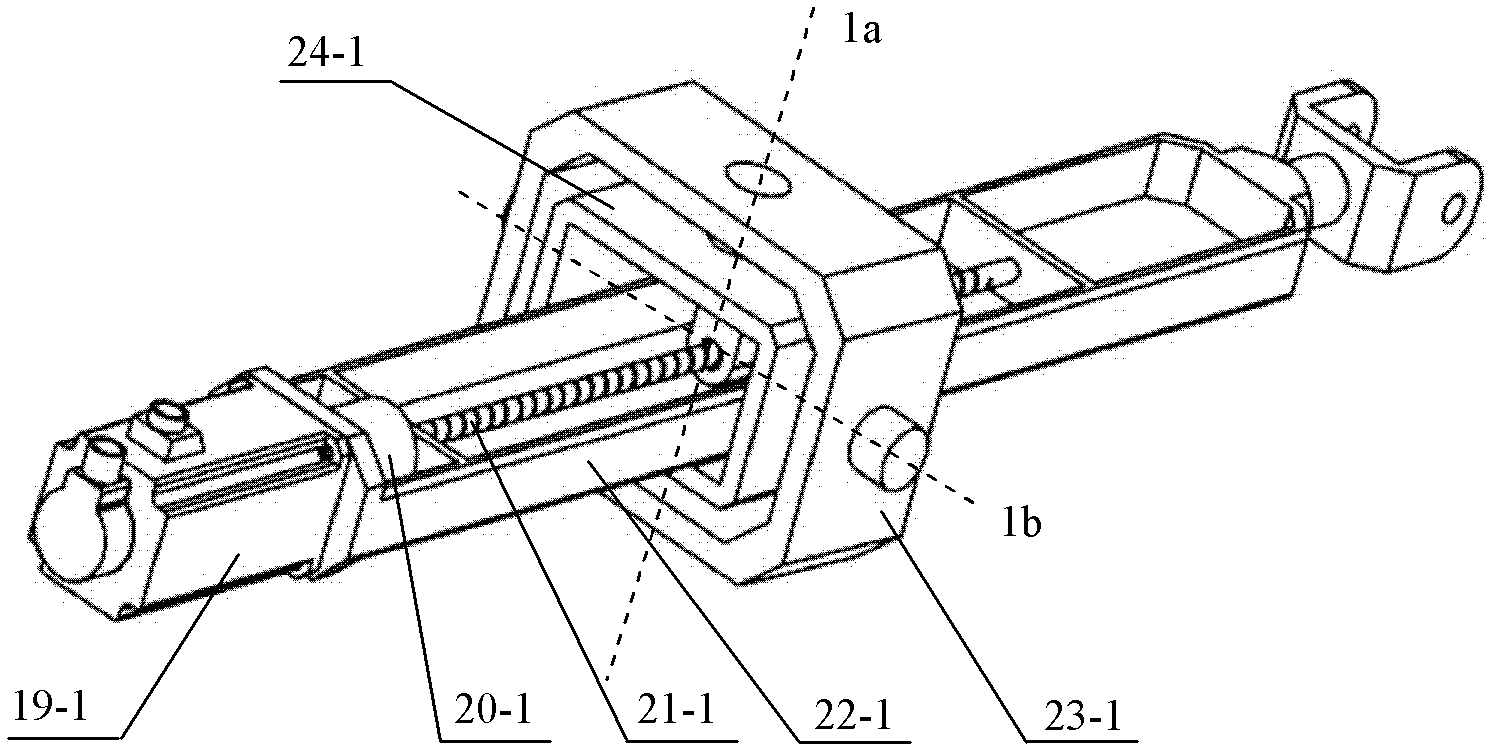
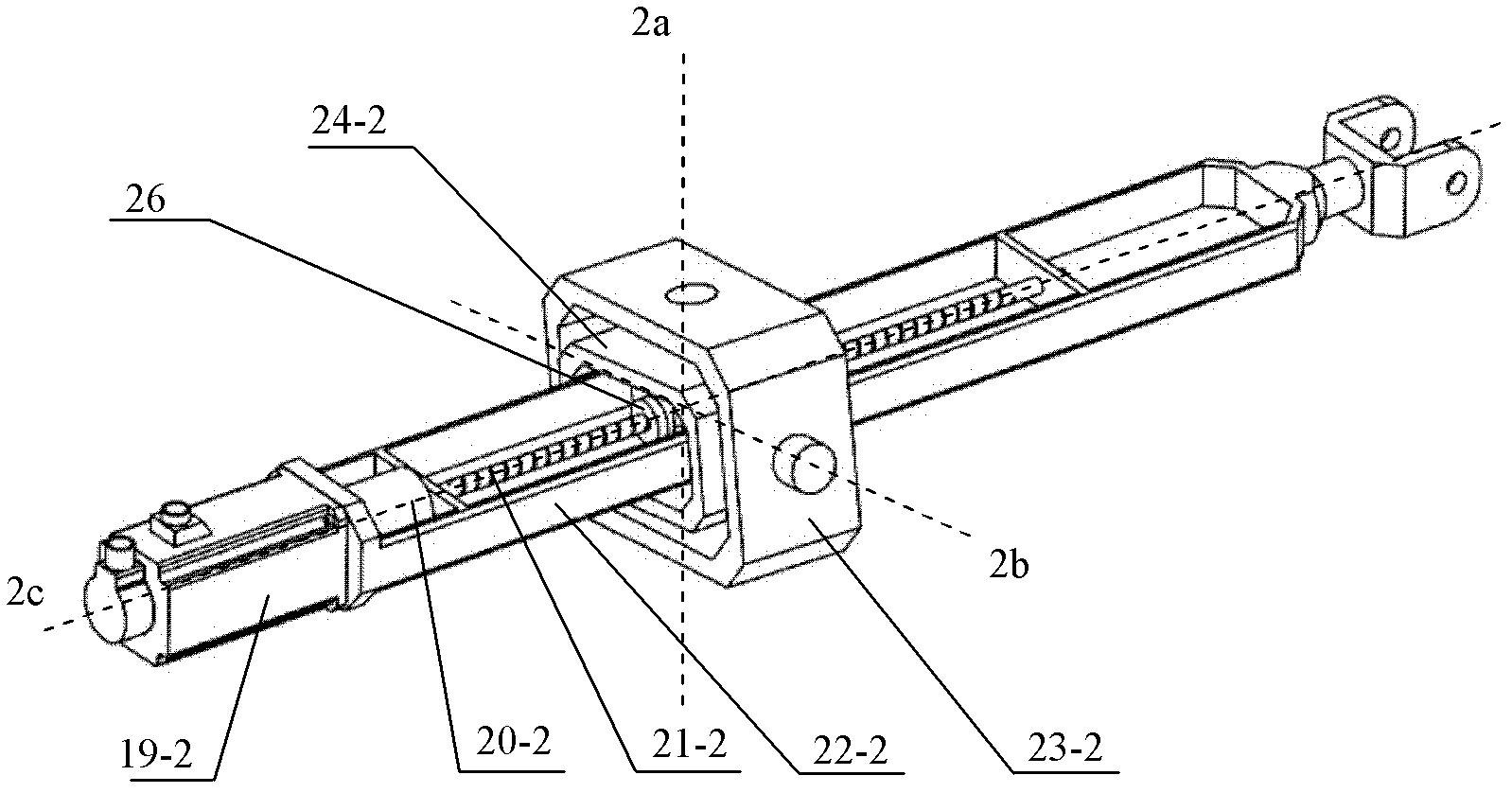
[0014] The novel four-degree-of-freedom parallel manipulator of the present invention comprises a fixed frame 5, on which an opening is opened at intervals of 90° along the same circumferential direction, and passes through the first and second holes respectively in the four openings. Two, the third, the fourth hinge 2, 17, 16, 4 are connected with the first, second, third, and fourth active branch chains 1, 18, 15, 3 in rotation, wherein the first and the third active branch chains 1 , 15 are arranged oppositely, the second and fourth active branch chains 18, 3 are arranged oppositely, and the first and third hinges 2, 16 respectively include the first outer ring 23 connected to the fixed frame through a hinge with one rotational degree of freedom -1 and the first inner ring 24-1 connected to the first outer ring 23-1 through a hinge with on...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap