

Indirect adaptive fuzzy sliding mode control method of SISO discrete time system
A discrete-time system, adaptive fuzzy technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of unguaranteed, difficult to obtain and express the model unknown system, difficult to ensure the stability of the system issues of sex and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
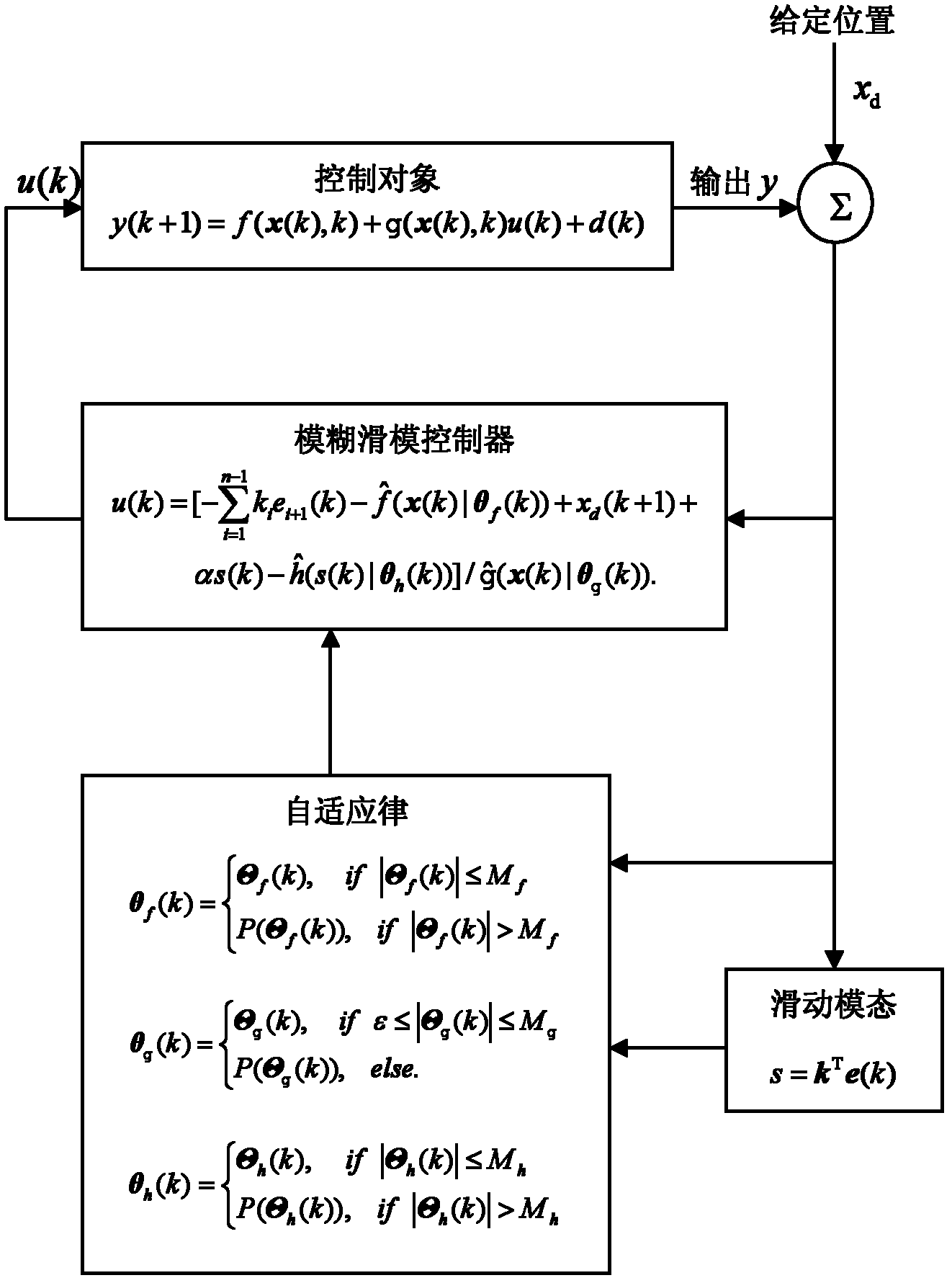
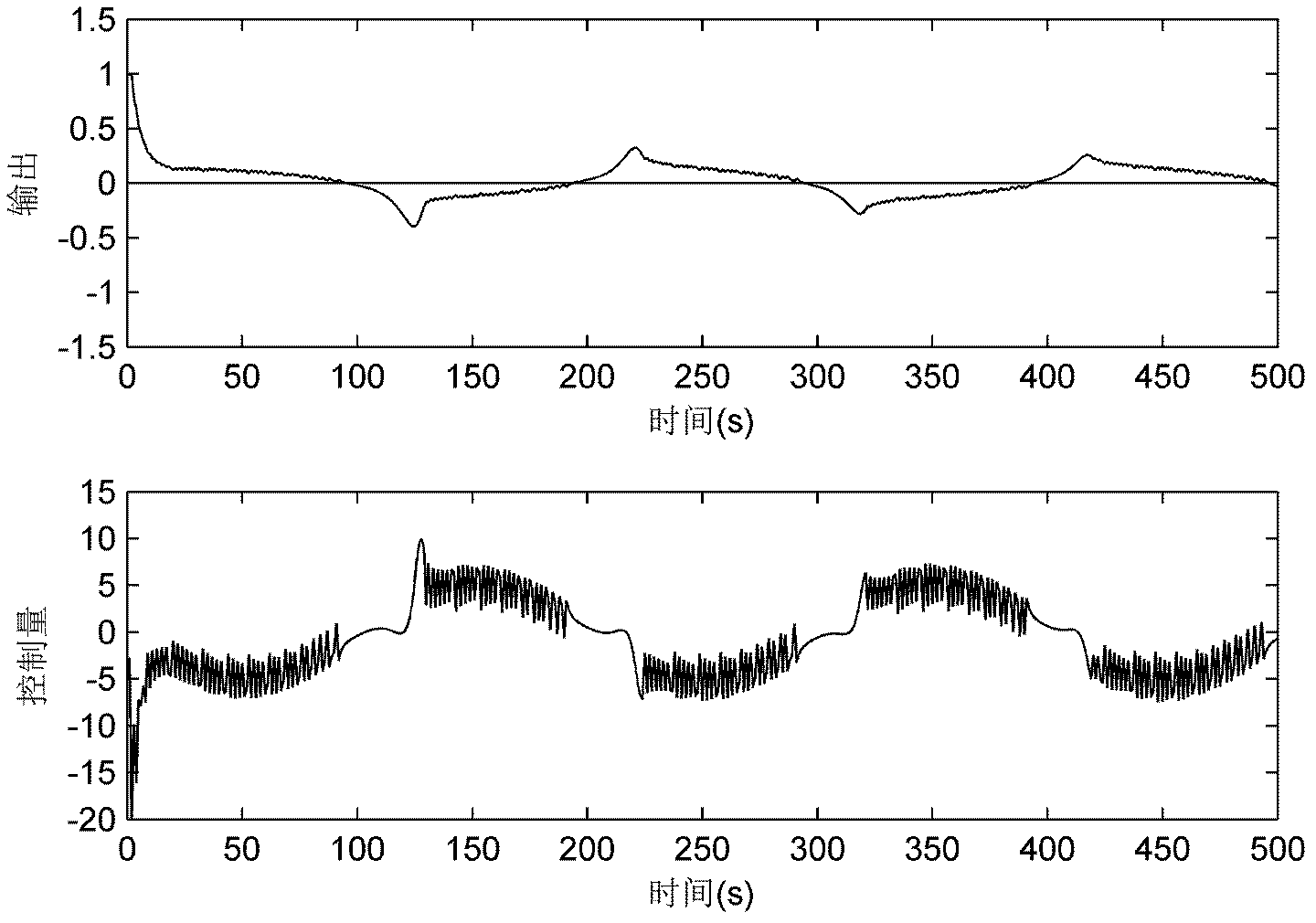
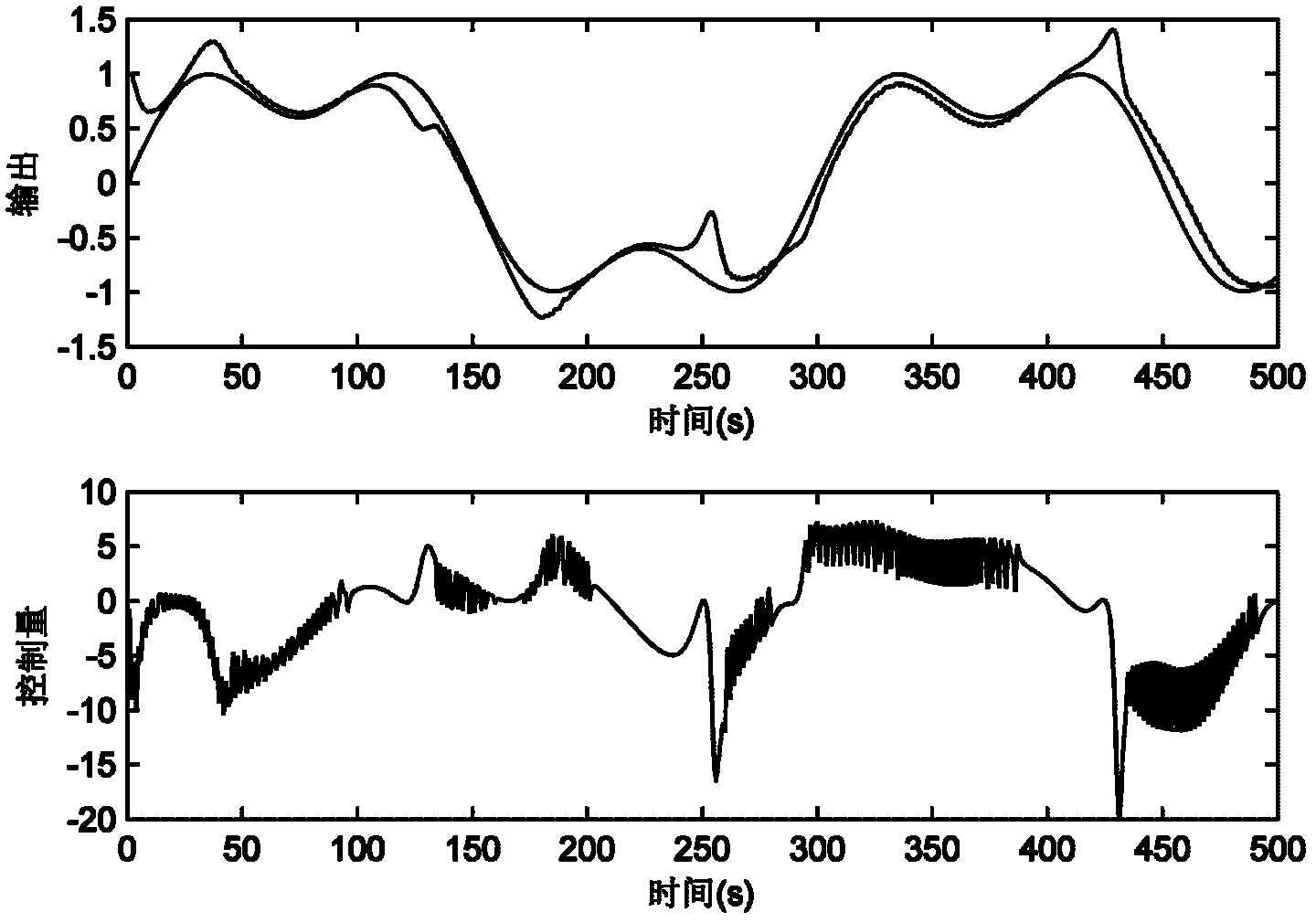
[0054] to the control object y ( k + 1 ) = 0.9 y ( k ) + 0.5 sin ( y ( k ) 5 ) + 0.01 u ( k ) + d ( k ) , Suppose the unknown nonlinear function of the system f(x(k)=0.9y(k)+0.5sin(y(k) / 5); g(x(k))=0.01. First, take the given trajectory as x d (k)=0, then take the given trajectory as x d (k)=sin(πk / 150)+0.4sin(πk / 50). Add unknown external disturbance d(k)=0.05sin(πk / 100).
[0055] This embodiment includes the following steps:
[0056] Step 1: Select offline p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More