

Three-degree-of-freedom flexible manipulator control device and method
A flexible manipulator and flexible arm technology, applied in the field of flexible robots, can solve the problems of difficult vibration control and weak damping of large flexible structures and flexible manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
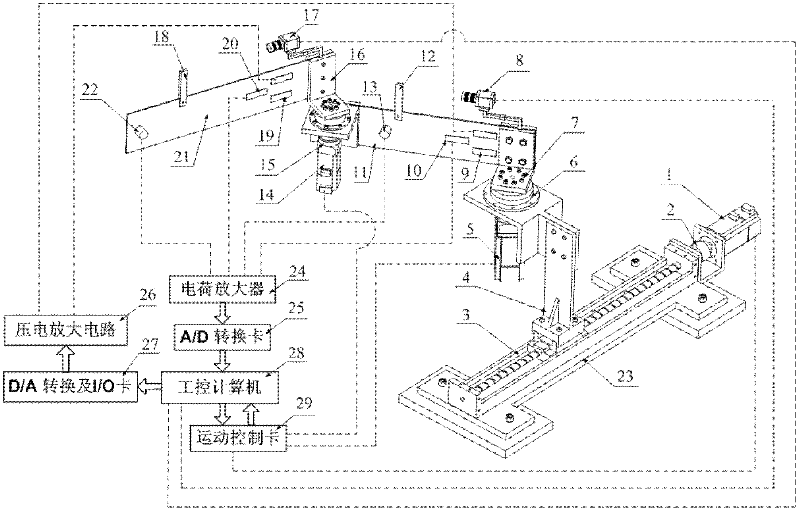
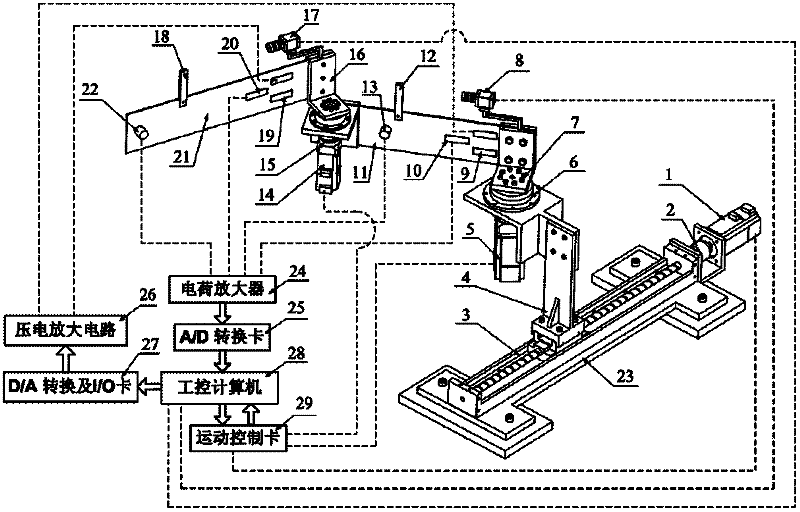
[0034] As shown in Figure 1, the servo motor Ⅰ1 drives the slider 4 of the ball screw 3 to move through the coupling 2, and the base of the ball screw 3 is installed on the fixed base 23; The input end of the reducer I6, the base of the reducer I6 is connected with the slider 4 of the ball screw 3 through the mechanical connection device, the output rotating flange of the reducer I6 is connected with the flange mechanical connection device I7, and the flange mechanically The connection device Ⅰ7 is connected with one end of the flexible arm Ⅰ11, and the flexible arm Ⅰ11 can rotate with the flange mechanical connection device Ⅰ7 after the servo motor Ⅱ5 is driven by the reducer Ⅰ6, and a CCD camera Ⅰ8 is installed on the flange mechanical connection device Ⅰ7, Vibration of the flexible arm I11 is detected by detecting the swing of the visual target rod I12 fixed on the upper end of the flexible arm I11.
[0035] The servo motor Ⅲ14 is installed on the input end of the reducer Ⅱ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More