Six-motion stacking robot
A palletizing robot and six-degree-of-motion technology, applied in the field of six-degree-of-motion palletizing robots, can solve problems such as large inertia, accumulation of joint errors, and inflexible movements, and achieve simple and compact overall structure, convenient error compensation, and flexible trajectory output Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
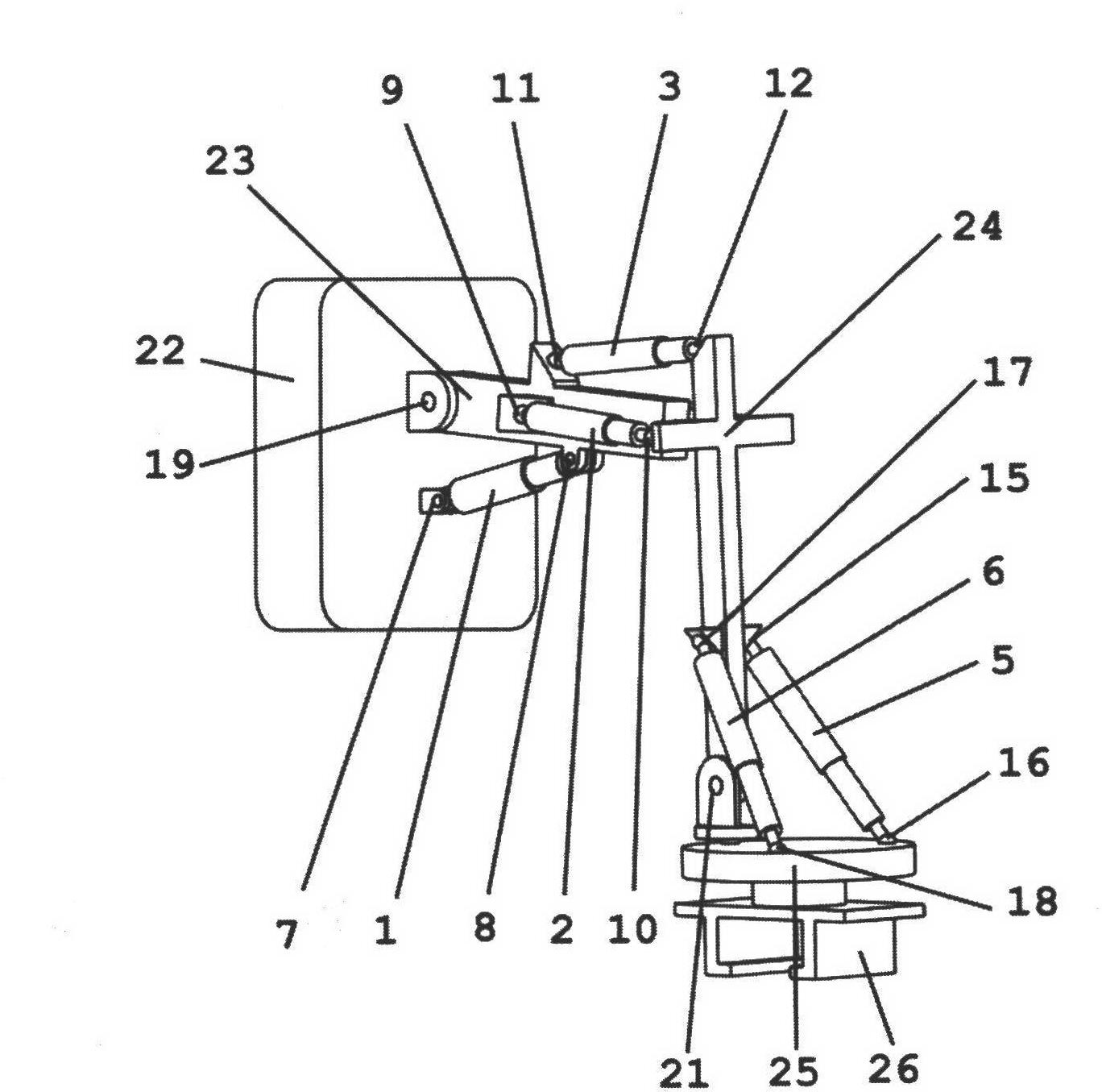
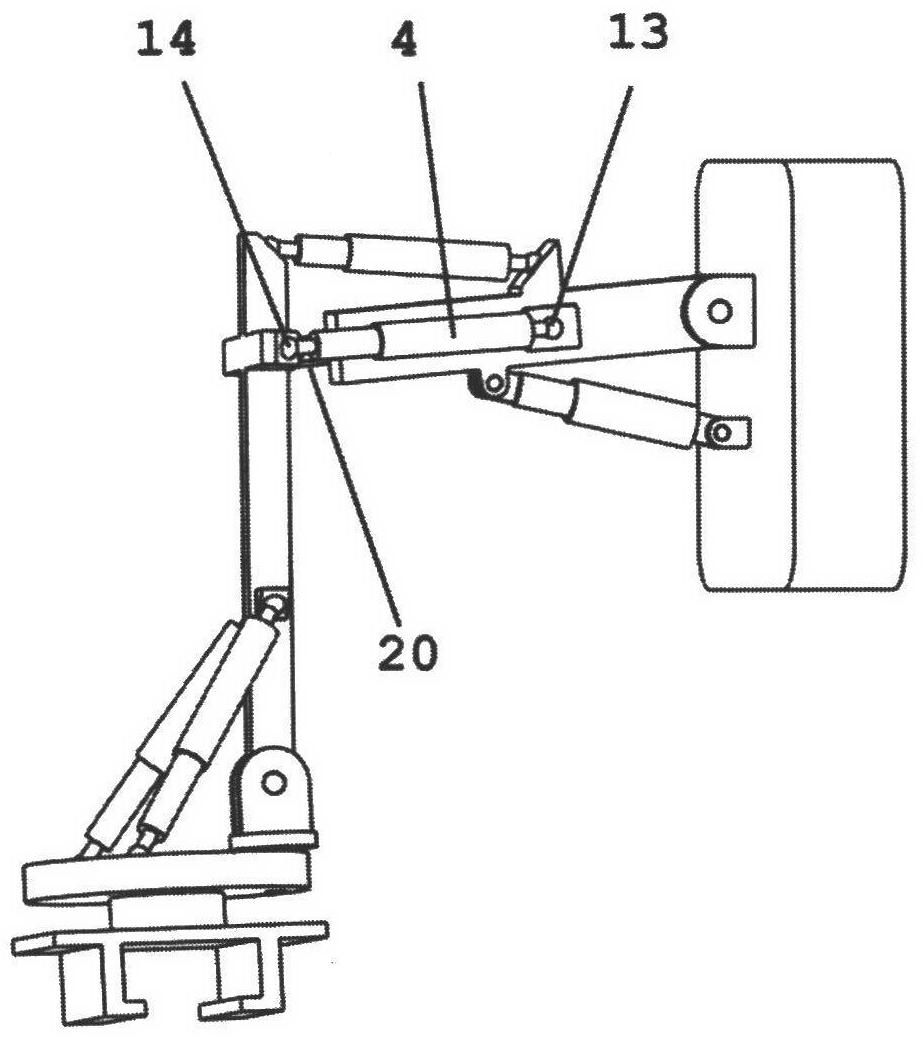
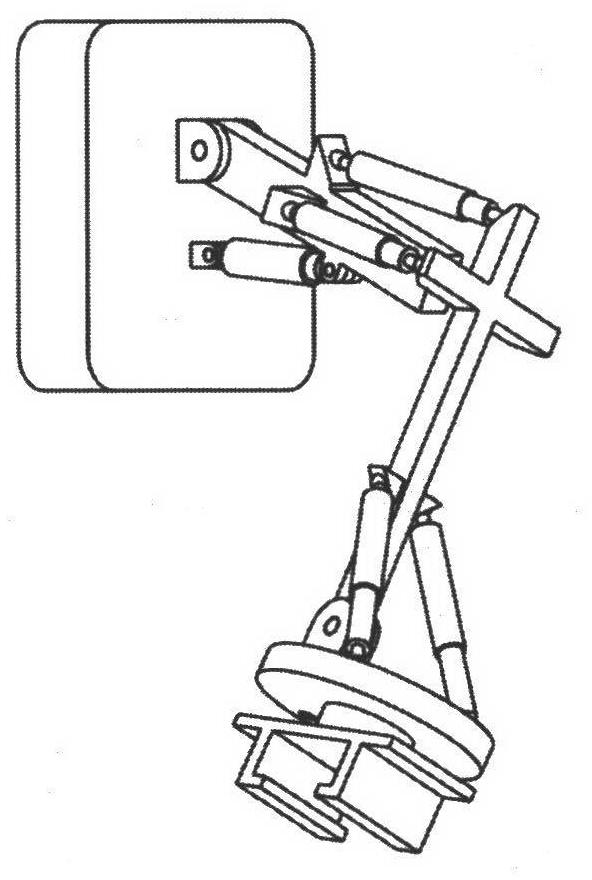
[0018] control figure 1 with 2 , a palletizing robot with six activities in space, including a first connecting rod 23, a second connecting rod 24, a moving platform 25, a frame 22, a first linear drive 1, a second linear drive 2, a third linear drive 3, a The four linear drivers 4, the fifth linear driver 5 and the sixth linear driver 6 have the structure and connection method as follows: one end of the first connecting rod 23 is connected to the frame 22 through the first rotating pair 19, and the other end is connected to the frame 22 through the first ball joint. 20 is connected with the second connecting rod 24, and the other end of the second connecting rod 24 is connected with the moving platform 25 through the Hooke hinge 21, and the electromagnetic clamping device 26 is installed on the moving platform 25.
[0019] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More