

Multi-Agent based robot combined search system by reinforcement learning
A technology of reinforcement learning and joint search, applied in the field of multi-robot joint target search, to achieve the effects of preventing collisions, improving search efficiency, and speeding up search speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to further explain the technical means and effects that the present invention adopts to achieve the intended purpose of the invention, below in conjunction with the accompanying drawings and preferred embodiments, the specific implementation, structure, features and effects of the present invention will be described in detail as follows: rear.
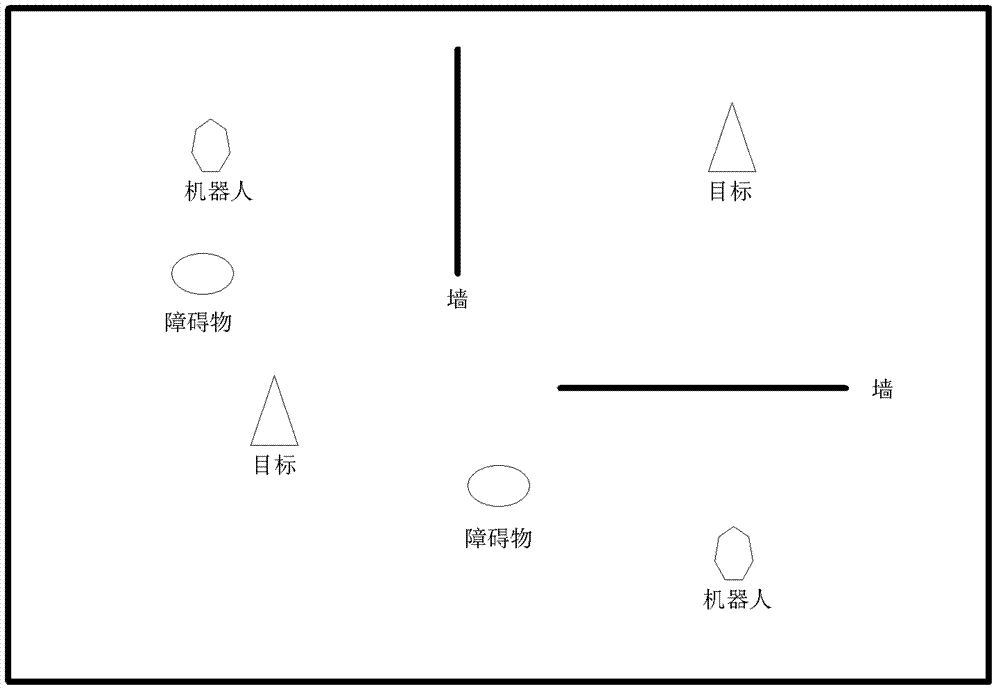
[0039] The research background of the present invention is as figure 1 As shown, in real life, it is often necessary to use robots to complete search tasks, such as the search for fire ignition points, radioactive substances or odor sources, etc. The search environment usually contains obstacles (walls, etc.), and the search target position is also unknown. .
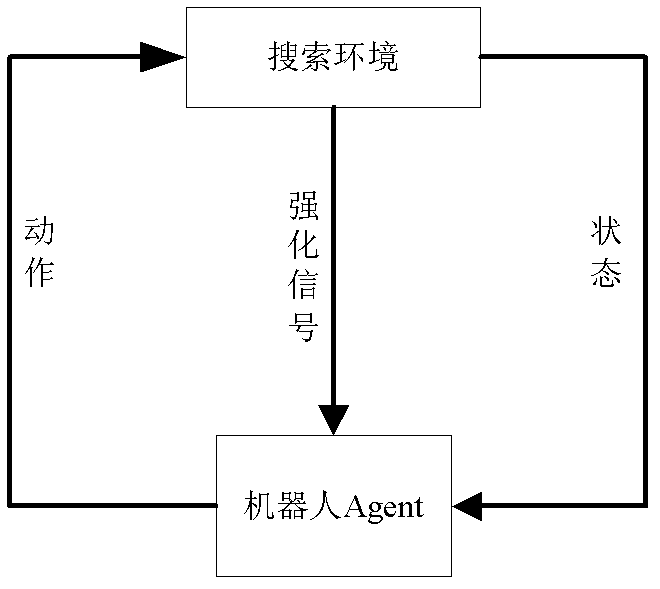
[0040] The overall structure diagram of the reinforcement learning algorithm involved in the robot joint search system based on multi-agent reinforcement learning is as follows figure 2 As shown in Fig. 1, the robot Agent obtains state values from the search...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More