

Intelligent integrated tennis ball picking robot
A robot and tennis technology, applied in the field of intelligent robots, can solve the problems of high cost, complex system control, poor autonomy, etc., and achieve the effect of strong autonomy, high intelligence and high ball picking efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
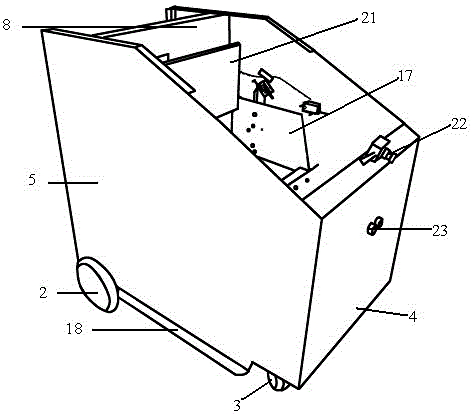
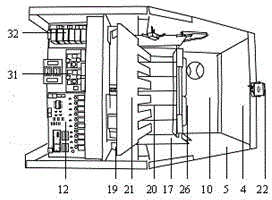
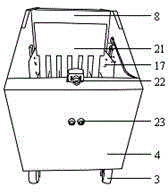
[0033] Such as Figure 1 to Figure 13 As shown, the intelligent integrated tennis picking robot of the present invention includes a mobile carrier, a picking device, an information acquisition system, a control system, an execution system, and a circuit module.
[0034] The information acquisition system includes a camera 22, an infrared detector, and an ultrasonic range finder 23, wherein: the camera 22 is used to continuously take pictures of the site, and the infrared detector is used to sense the position of the ball inside the moving carrier; the ultrasonic range finder 23 is used to sense the movement Obstacles in front of the carrier; the control system includes an image processing module 28 and an overall control module 27, and the execution system includes a speed regulation module 31, a motor drive module 32, a wheel motor 1, a ball picking motor 13, a ball pulling motor 19 and a wireless transceiver module 30; camera 22 is connected with overall control module 27 by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More