

Falling forest fruit pickup robot
A robot and picker technology, applied in the field of automation, can solve the problems of low picking and harvesting efficiency, device jamming, and high missed picking rate, and achieve high picking efficiency, reducing missed detection rate, and good effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below through the specific examples, the following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention with this.
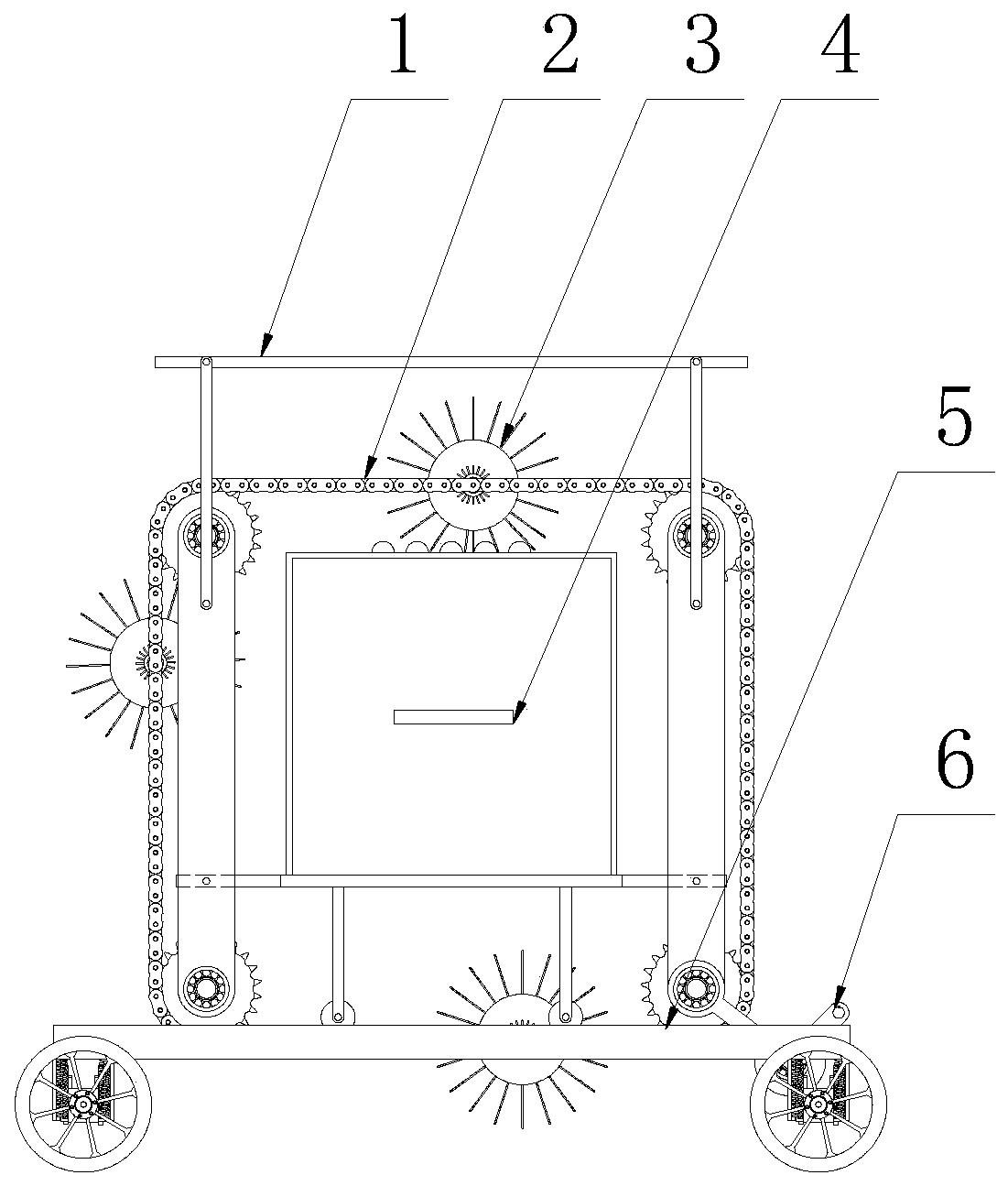
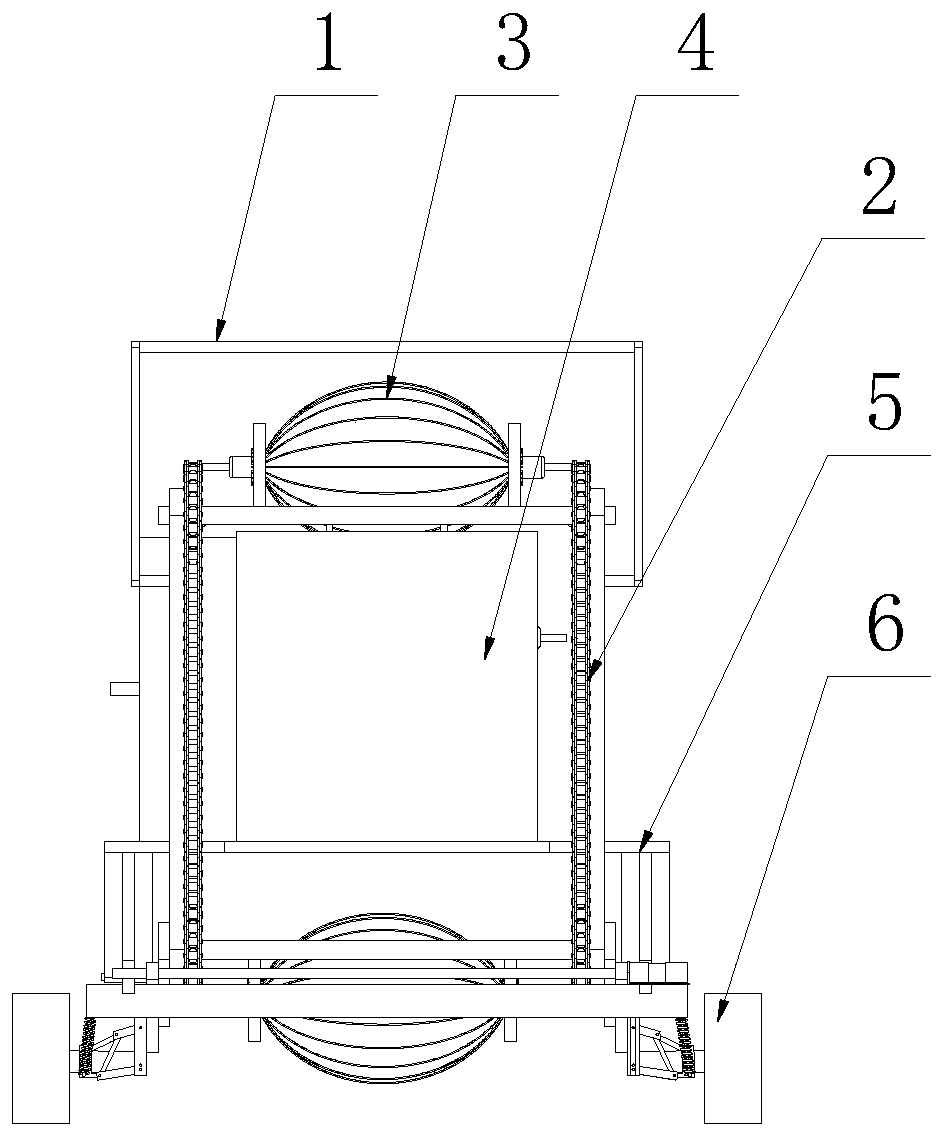
[0031] A robot for picking up fallen forest fruits, including a combined power supply device 1, a self-propelled mobile chassis 5, and a manipulation control device, and it also includes a picker 3, a fruit collector 4, a conveying mechanism 2, a horizontal swing mechanism 6, and the fruit collector rolls Set on the self-propelled mobile chassis, the conveying mechanism is set on the fruit collector, the combined power supply device and the picker are all set on the conveying mechanism, one end of the horizontal swing mechanism is symmetrically set on the self-propelled mobile chassis, and the other end is connected with the conveying mechanism The hinged installation and the manipulation control device are respectively connected with the sel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More