Precise two-degree of freedom micro-displacement positioning device
A technology of precise positioning and micro-displacement, which is applied to the parts and instruments of instruments, etc., can solve the problems of reducing the accuracy of the mechanism, reducing the motion straightness of a single degree of freedom, and large disturbance of the degree of freedom, etc., and achieves the effect of improving the positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] combine figure 1 , figure 2 , image 3 This embodiment will be described.
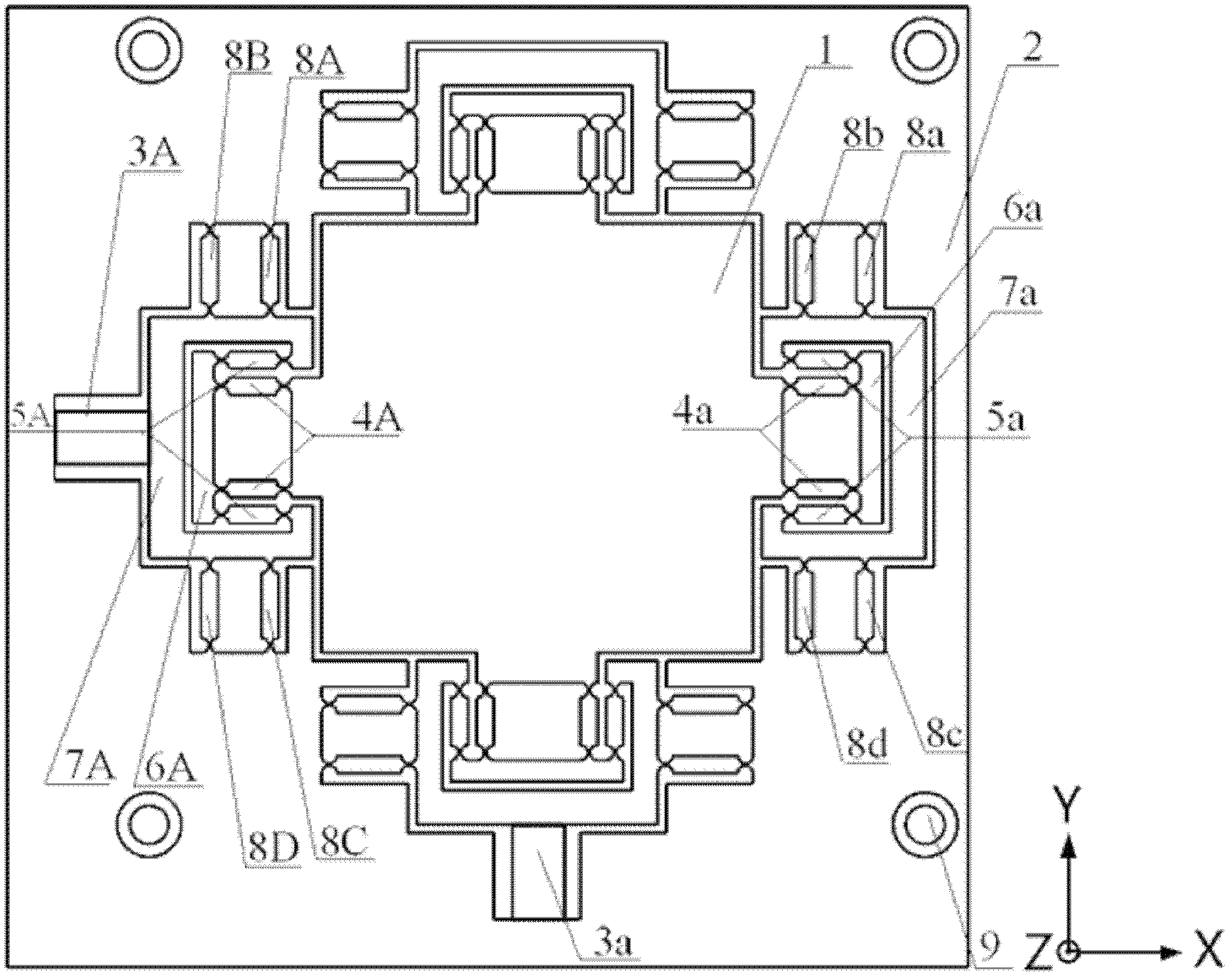
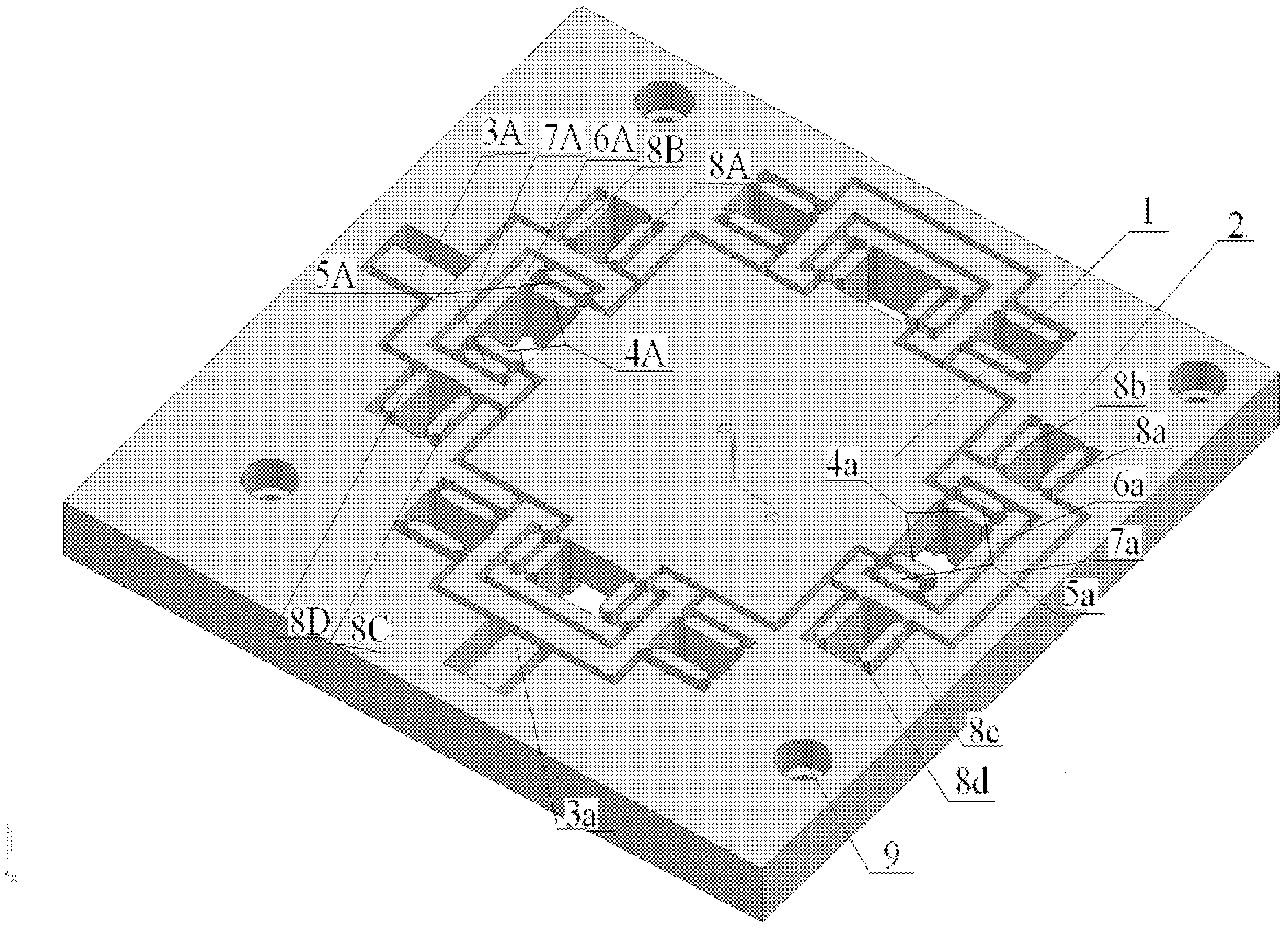
[0015] Such as figure 1 , figure 2 As shown, the present invention is a two-degree-of-freedom micro-displacement precision positioning device, which mainly includes a stage 1, a substrate 2, four sets of parallelogram guiding mechanisms with the same shape and structure, a first piezoelectric actuator 3A and a second piezoelectric actuator 3A. Two piezoelectric actuators 3a.
[0016] The nested parallelogram flexible linkage mechanism includes a first flexible double-linkage group 4A, a second flexible double-linkage group 5A, a rigid rod 6A and a U-shaped rigid rod 7A; the first flexible double-linkage group 4A and the second flexible double link group 5A are respectively composed of two flexible links parallel to each other and having the same shape and structure, and the two ends of the flexible links are rigid bars of the flexible hinge. The two ends of the first flexible double link...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More