

Design method for resolving modal space controller of hydraulic drive six-degree-of-freedom parallel mechanism
A modal space and design method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve system oscillation, failure to exert system control characteristics, modal decoupling control engineering implementation limitations, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0088] a: Load system parameters, system parameters include three groups:
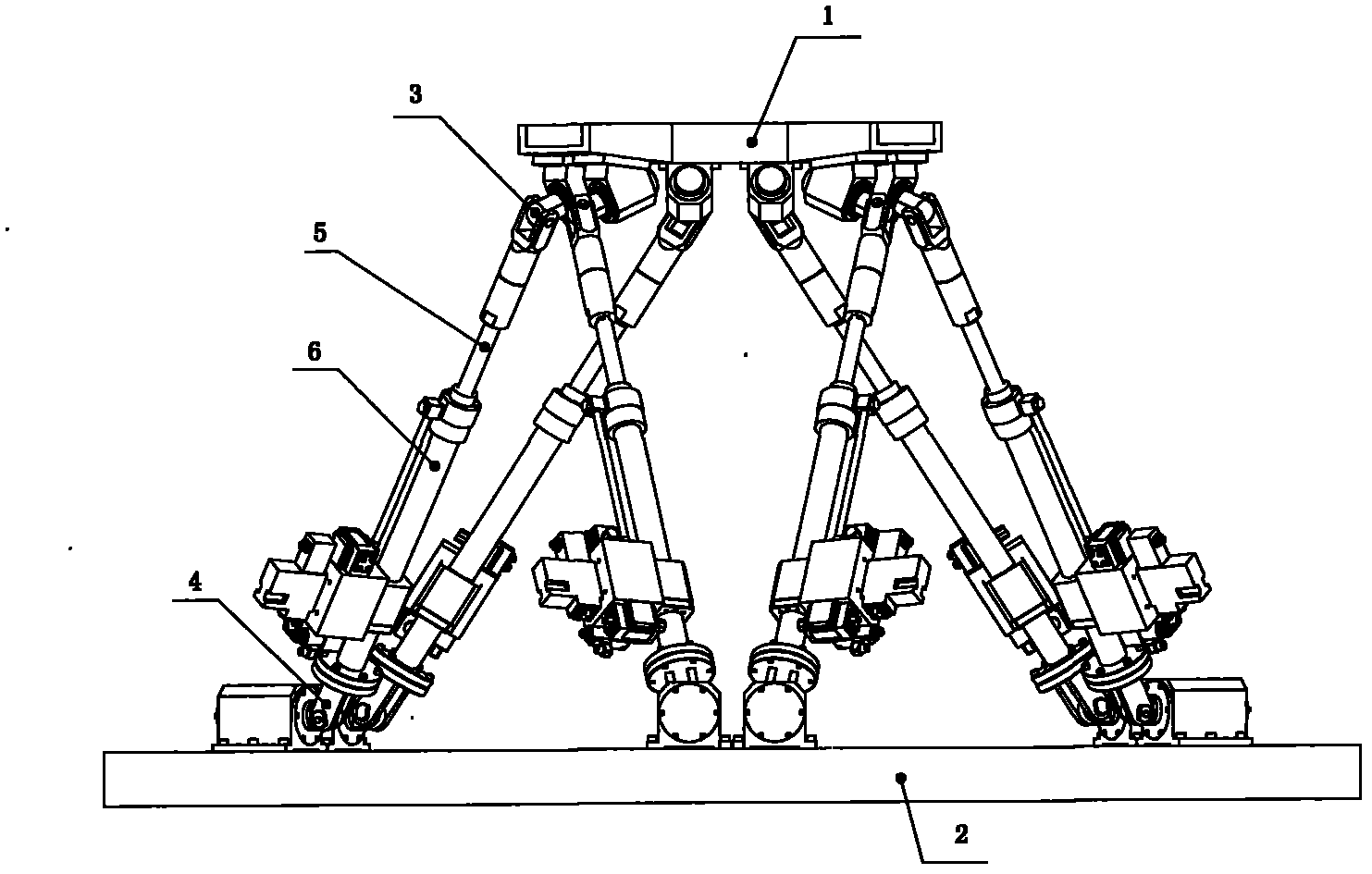
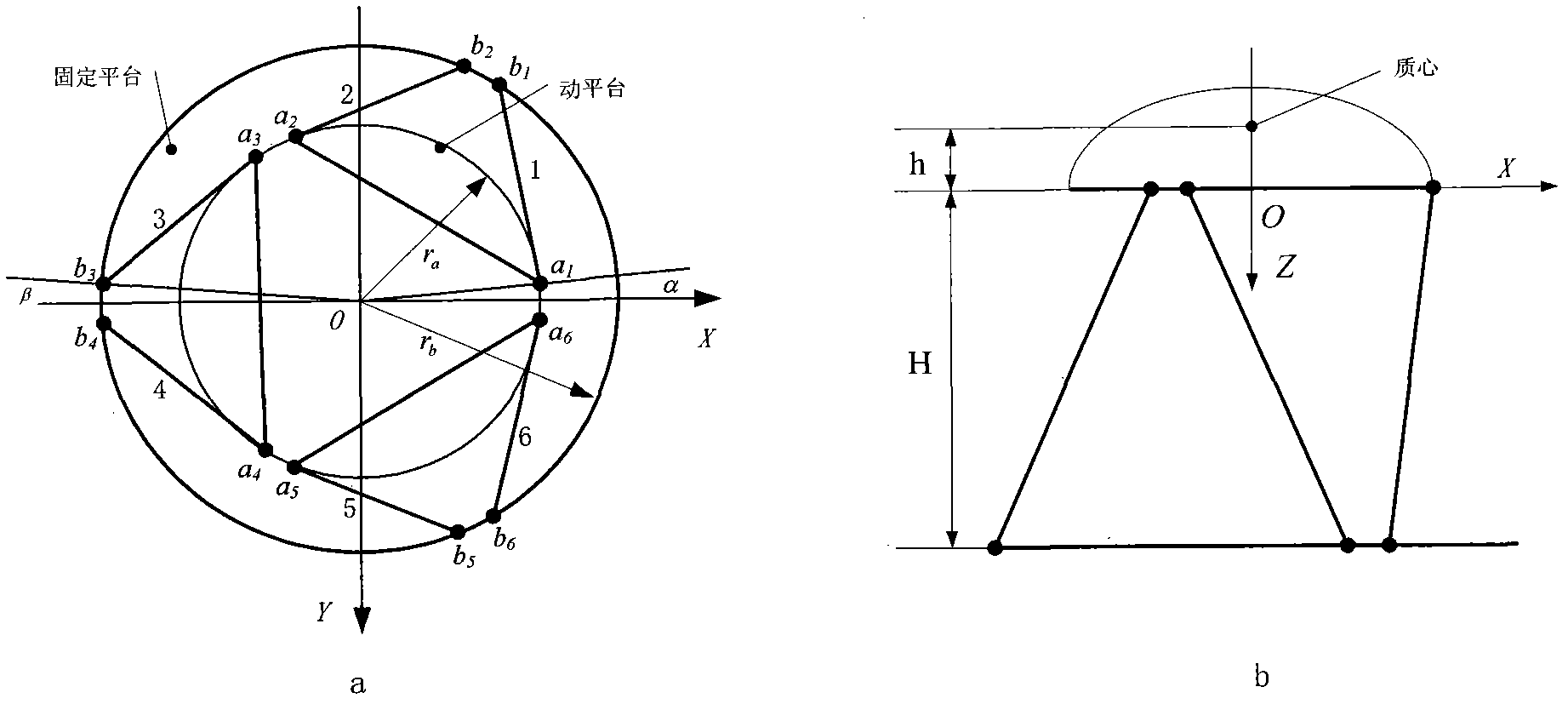
[0089] Structural parameters of six degrees of freedom parallel mechanism
[0090] r a = 0.56m, r b =1.2m, α=13.4°, β=10.8°, h=0.163m, H=1.64m,
[0091] m=178.6kg, I xx =13.6kg·m 2 , I yy =13.6kg·m 2 , I zz =23.9kg·m 2
[0092] Characteristic parameters of hydraulic actuators
[0093] beta e =7×10 8 Pa, L=0.7m, D=0.063m, d=0.045m.
[0094] Servo Valve Characteristic Parameters
[0095] K aa =40mA / V, K q =1.1225×10 -4 (m 3 / s) A.
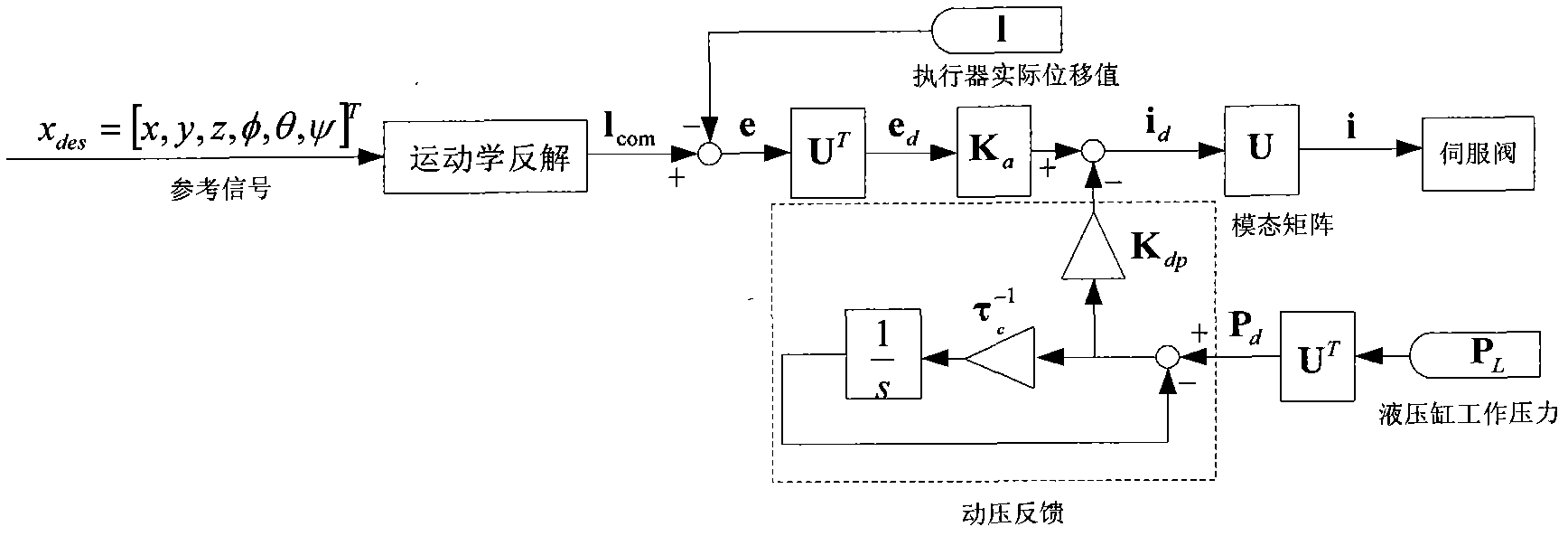
[0096] b: According to the structural parameter r of the six-degree-of-freedom parallel mechanism a , r b , α, β, h, m, I xx , I yy , I zz , using the analytical formula provided by the present invention to calculate the modal matrix U, the inverse modal mass matrix According to the characteristic parameter β of the hydraulic actuator e , L, D, d to calculate the hydraulic stiffness matrix K.
[0097] The calculation result of U is as follows:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More